O.K.,
Got one of Bill's boards assembled and not hard. Only problem is the pinned headers on the respective EggFinders. I assembled one board and the instructions are fine.
Bill suggests press fitting but..............I'd suggest if going with a screaming meeemeee flight to solder it down on the particular EggFinder used. That said, I didn't solder my one of two
loggers to the EggFinder and diddled with it like heck by tinning the pins on each EggFinder on the headers until I got good contact.
My first one, the "run" header had lousy contact so I messed with building up the pins on the Eggfinder with solder. I press fit the logger to the board and nada, nothing with the EggFinder.
I put the run jumper on over the logger board and there is a tiny blue LED on the logger board that lights up to indicate it's working. I kept building up and bending the two pins until I had contact and then success without that added "external" jumper!
I used this program on my computer to convert the NMEA text to .kml files:
https://gnss-info.blogspot.com/p/download-eng.html I "ABSOLUTELY" hate internet dependency out in the field
and try to achieve independence. This program on a tablet will achieve that. After conversion, I got these screen saves after a little walk:

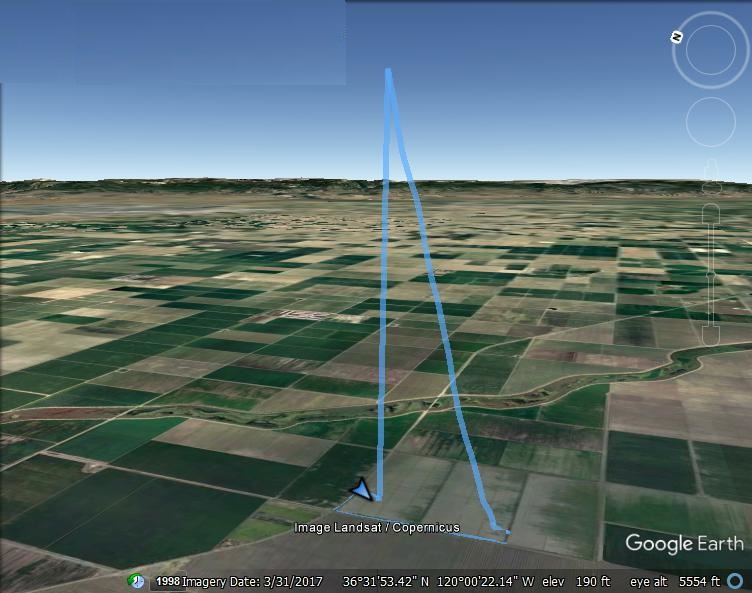
And then zoom down to this:

That little curly cue off the right is where I went over to a neighbor walking a dog who asked if I was, "playing Pokemon." I said, "No, testing a tracker for HPR where I fly at a location a long ways from here with FAA blessing so's not to disturb travelers." She was impressed to say the least. A lot of points are plotted at once/sec at walking speed. It's nice with Google Earth that
there are data points and the blue arrows on zoom-in is the direction of travel! I really like that.
Once the track is converted to .kml, go to Google Earth and load it in. That's the pics I got above.
I then pulled the logger off the first EF I had and plopped it on a second one. This time the shorting for RUN was connected fine with the holes in the logger board but the power and data 3 pinned header didn't have contact. Soooooooooooo............... Back to building up the header pins on the +, - and signal pin. Got it working fine and running.
I jiggled the board assembly and the contact was maintained on both EggFinders so I believe ready for flight. The nice thing about it is as long has the RUN header pins remain shorted
the EggFinder will continue to track. When I fly with the logger, I'm going to make certain that I tape a shorting block on the RUN pins that are projecting through the logger board assembly as added insurance that at least the EggFinder remains operational to track.
If the logger board loses power, no big deal as long as the EggFinder continues tracking. If the RUN header block loses continuity in the logger board assembly, one might end up with a lost rocket.
Again, if going with a "crazy flight", might want to consider soldering the logger to the prospective EggFinder to be certain of reliability of tracking/finding the rocket and recording the flight. I can tolerate losing a record of a flight if I can get by with getting the rocket back but if that RUN header opens during a completely out of sight flight, one is at risk of losing the rocket.
The only setback of soldering the RUN header together is the loss of ability to program different parameters into the EggFinder. Something to consider when weighing whether or not one
wants to go all the way to further improve reliability. Clipping a shorting block with tape on the pins or by whatever reversible means is added insurance the tracker will continue to run.
Me? I'm going to diddle and tweak the logger board and if I see good continuity, I'm not going to mess with a permanent solder solution. I'd like to be able to program my EFs in the future. Again, a temporary "shorting solution" on the RUN header pins will improve "recoverability" with logger failure. That should be one's priority if running this logger.
The record on Google Earth is nice at least with the slow speed test I did.
Kurt Savegnago














") )
)