



CarVac
Well-Known Member
- Joined
- Feb 12, 2012
- Messages
- 5,704
- Reaction score
- 37
The past few months I have been working on a 3" research rocket designed to measure the effects of various tailcones on drag at supersonic speeds.
While I've seen papers on bullet boattails, there is scant (I couldn't find it) free-flight experimental data above Mach 1.2 of aerodynamic bodies sized more like rockets.
In order to capture data on a useful range of tailcones, we need a large ratio between the airframe diameter and the final diameter of the motor. By combining this objective with size and cost constraints, we selected a 3" airframe with 54mm snap-ring motors.

The 54mm motor which gets the highest speed in a 3" rocket, so far as my simulations have predicted, is the Kosdon-by-Aerotech Animal-compatible L2300G. Any other motor is a compromise. The CTI K1440WT goes nearly as fast, but the full-width aft closure limits the range of testable tailcones. The Loki L1400LW reaches about the same speeds as the K1440, but it's not certified in California. Nothing else comes close speed-wise, and the 54/2550 KBA motors additionally offer a dramatic cost advantage. On the other hand, the L2300 has acquired a reputation for blistering cases, so we bought an extra case. Additionally, we contacted the manufacturer, who told us to inhibit the smoke grain and bond everything in. Hopefully that's enough...
The tailcones themselves are cut from aluminum, and mounted on the rocket with custom cut Acme threads. They taper at 0, 5, 10, and 15 degrees from the OD of the rocket, 3.135 inches, over a length of 1.619 inches (the longest possible for a 15 degree tailcone).

They're pretty awesome.
Each tailcone will be flown at least 3 times so that we can measure variance. Thus, we have 14 L2300's waiting in the wings to be flown.
The rocket itself is made from 3" PR filament-wound fiberglass tubing, except for the parachute bay which is made from 3" carbon-fiber which we acquired (intercepted it when it was being thrown out). The nosecone is a PR 3" 5:1 FWFG metal-tipped von Karman part. The fins are .072" thick CF panel from ACP; I decided their size merited a bit more thickness and so laminated 6oz CF on the central part of each fin to reduce the tendency to flutter.

We actually have materials for two airframes, in case disaster strikes; the second one is in construction by two freshmen I'm mentoring on this project.
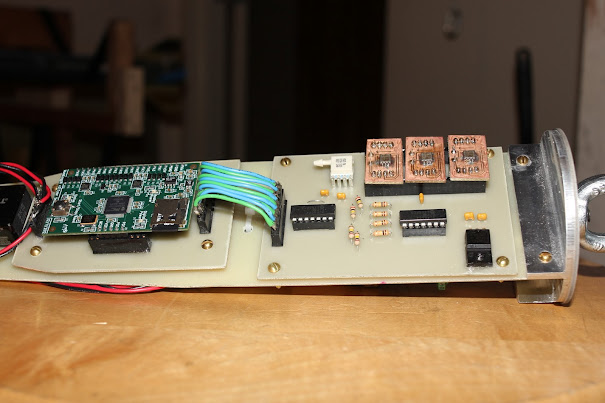
For electronics, we have a MuddLogg16 v3 (and a backup in case one fails) logging. It features 16 channels of 16-bit data collection. https://www.eng.hmc.edu/NewE80/PDFs/MuddLogg16UserGuide.pdf
Feeding the MuddLogg16 are one pressure sensor, and 3 125g accelerometers, all oriented along the rocket's axis. If the flights are off-vertical, we will work out what the angle of the rocket is based upon GPS data. The sensors are all 5V, while the data logger only measures up to 3.3 volts, so the output data is buffered by a single-sided op-amp, run through a voltage divider, and then buffered again before going into the data logger.
This is all shoved into the nosecone; on the far side is a Beeline GPS 70cm and a Raven2. It's mounted with the "glueless" technique that CJ showed in his 3" Darkstar thread; there's an allthread running down the opposite side of the G10 sled.
For recovery, we're using a 60" Spherachute and redundant Archetype Rocketry cable cutters.
Here's the RASAero file for the rocket with the straight aft section; change the boattail base diameter from 3.1349 to 2.853, 2.573, or 2.297 (5, 10, 15 degree half-angle) to see what the boattails look like. The narrower ones are slightly lighter. It predicts around 14-15,000 feet, with a gain in about 1000 feet from the 15 degree boattail.
View attachment tailcone_king.alx1
That's all for now; I'll post an .ork file later. OpenRocket claims this thing goes only 11-12,000 feet. I'm not sure which to believe. In between?
While I've seen papers on bullet boattails, there is scant (I couldn't find it) free-flight experimental data above Mach 1.2 of aerodynamic bodies sized more like rockets.
In order to capture data on a useful range of tailcones, we need a large ratio between the airframe diameter and the final diameter of the motor. By combining this objective with size and cost constraints, we selected a 3" airframe with 54mm snap-ring motors.
The 54mm motor which gets the highest speed in a 3" rocket, so far as my simulations have predicted, is the Kosdon-by-Aerotech Animal-compatible L2300G. Any other motor is a compromise. The CTI K1440WT goes nearly as fast, but the full-width aft closure limits the range of testable tailcones. The Loki L1400LW reaches about the same speeds as the K1440, but it's not certified in California. Nothing else comes close speed-wise, and the 54/2550 KBA motors additionally offer a dramatic cost advantage. On the other hand, the L2300 has acquired a reputation for blistering cases, so we bought an extra case. Additionally, we contacted the manufacturer, who told us to inhibit the smoke grain and bond everything in. Hopefully that's enough...
The tailcones themselves are cut from aluminum, and mounted on the rocket with custom cut Acme threads. They taper at 0, 5, 10, and 15 degrees from the OD of the rocket, 3.135 inches, over a length of 1.619 inches (the longest possible for a 15 degree tailcone).
They're pretty awesome.
Each tailcone will be flown at least 3 times so that we can measure variance. Thus, we have 14 L2300's waiting in the wings to be flown.
The rocket itself is made from 3" PR filament-wound fiberglass tubing, except for the parachute bay which is made from 3" carbon-fiber which we acquired (intercepted it when it was being thrown out). The nosecone is a PR 3" 5:1 FWFG metal-tipped von Karman part. The fins are .072" thick CF panel from ACP; I decided their size merited a bit more thickness and so laminated 6oz CF on the central part of each fin to reduce the tendency to flutter.
We actually have materials for two airframes, in case disaster strikes; the second one is in construction by two freshmen I'm mentoring on this project.
For electronics, we have a MuddLogg16 v3 (and a backup in case one fails) logging. It features 16 channels of 16-bit data collection. https://www.eng.hmc.edu/NewE80/PDFs/MuddLogg16UserGuide.pdf
Feeding the MuddLogg16 are one pressure sensor, and 3 125g accelerometers, all oriented along the rocket's axis. If the flights are off-vertical, we will work out what the angle of the rocket is based upon GPS data. The sensors are all 5V, while the data logger only measures up to 3.3 volts, so the output data is buffered by a single-sided op-amp, run through a voltage divider, and then buffered again before going into the data logger.
This is all shoved into the nosecone; on the far side is a Beeline GPS 70cm and a Raven2. It's mounted with the "glueless" technique that CJ showed in his 3" Darkstar thread; there's an allthread running down the opposite side of the G10 sled.
For recovery, we're using a 60" Spherachute and redundant Archetype Rocketry cable cutters.
Here's the RASAero file for the rocket with the straight aft section; change the boattail base diameter from 3.1349 to 2.853, 2.573, or 2.297 (5, 10, 15 degree half-angle) to see what the boattails look like. The narrower ones are slightly lighter. It predicts around 14-15,000 feet, with a gain in about 1000 feet from the 15 degree boattail.
View attachment tailcone_king.alx1
That's all for now; I'll post an .ork file later. OpenRocket claims this thing goes only 11-12,000 feet. I'm not sure which to believe. In between?
Last edited:
")

