...please be gentle! ")
1) Has anyone thought about or implemented a common "power bus" in their avbay? It seems logical (to me) to do so, but I have zero HPR experience. Seems like the benefits are many assuming your avionics are compatible.
It's one of those decisions that I need to make on the front end of the avbay design.
In my case, I am using Altus Metrum as the main vendor: TeleMega v5.0, and EasyMini v2.0.
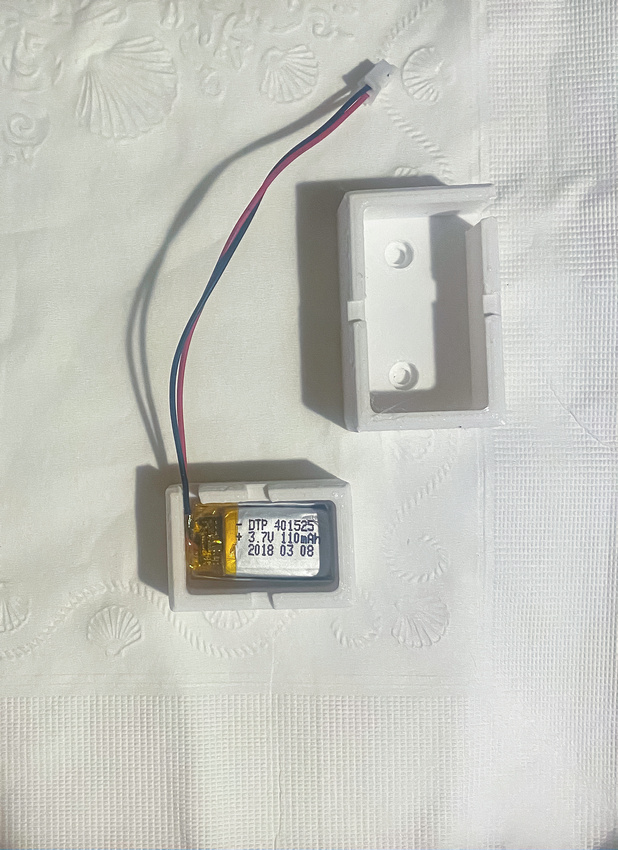
Since both of these flight computers can function on 3.7vdc LiPo, a common power bus and ground plane seem reasonable.
a) Adds more redundancy: We use dual recovery hardware, but then power each with a single cell/battery. That doesn't seem like best practices for me, UNLESS risk is accepted to shave a few more grams by NOT having redundant power. In which case, you might as well go with a single system. To have redundant batteries with individual power buses requires 4 cells/batteries. With a common power/batt bus and ground plane, you can provide redundant power to both computers (and in my case all charges) with only the 2 cells/batteries you were going to use in the first place (caveat in 2)
b) Weight: You get redundant power at less weight (using two cells/batts that can power the entire load by themselves). Constructed properly, you could actually implement redundant power/ground buses/planes and still save a bunch of weight (IAW: you'd still have TWO switches, but each switch would turn on BOTH systems. Failure Case? Bad switch, failure of a conductor or connection somewhere.)
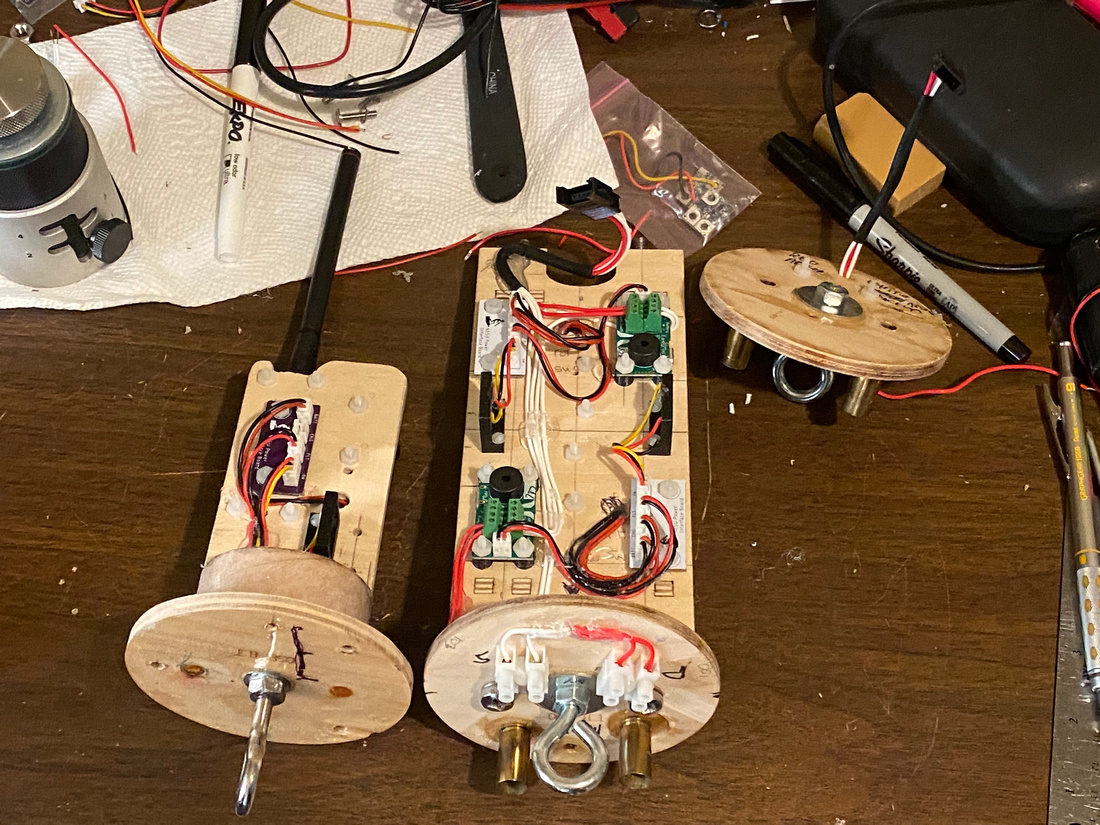
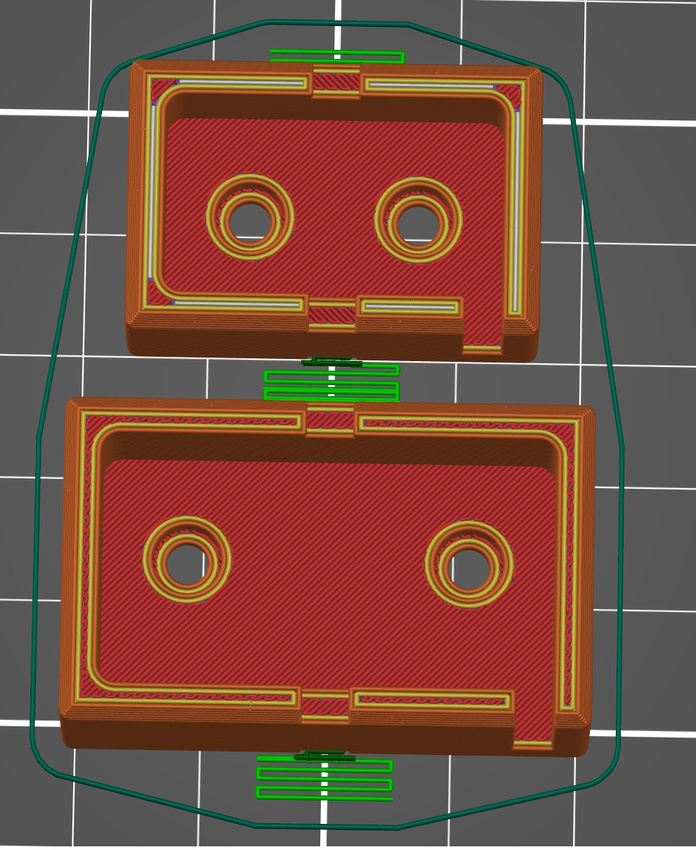
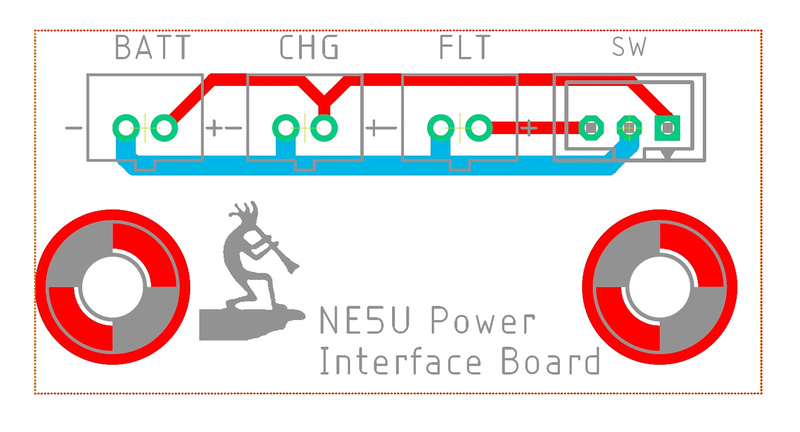
c) MANY ways to implement. Easy way is to simply use sufficiently sized bus wire in twisted pair with multiple connectors, but you could ALSO get creative and do it with double-sided (one or more copper-clad as required) PCBs (or custom etched boards). Use PCB strips with sufficient copper weight to provide equivalent wire size. I'm thinking a triangular or square tube as wide as the widest avionics board. Power on one side (likely inside) and ground (likely outside for several reasons on the other. Connectors soldered to the board for twisted pair harnesses to the avionics assemblies. Or build the tube from CF sheet and run the buses through the center bonded to the back of the CF strips.
d) The tube (I prefer the triangle in theory) forms the core of the avbay structure, mounting base for avionics & batteries, and I'm seeing a way to use composite rods with threaded metal tips bonded to them to carry power/ground to the pyro charges with as few as 3 rods and only three penetrations through the bulkheads (except perhaps an penetration for an antenna passthrough or an external antenna connection.
e) Designed properly, you could make it a module that could be moved from one diameter to another airframe.
f) If you can make the tube "hinged", you could size it to accommodate the entire power bus and batteries INSIDE, and the combination of a continuous ground plane (or CF), and/or twisted pair, can help significantly reduce/eliminate common mode and general RFI/EFI to the radio(s) and GPS. Hinged side is more weight, but cleaner, and moves more mass closer to the center-line of the air-frame.
g) ALL that metal that you use in the ground plane/bus adds to the ground planes on the individual PCBs, thus providing a much better return path for the antennas in the unit, thus generally improving their performance.
So many options... this is just a few off my brain-storming list.
2) Does anyone other than the min diameter folks and altitude chasers ever attempt to design to "specifications to accomplish mission, survive, and fly again" rather than "specifications to avoid all failure cases anticipated regardless of probability"?
I've been studying a lot of builds both here and elsewhere. It seems like there is a definite propensity to "over-build" resulting in a lot more mass than "necessary" and frankly a waste of thrust! (For example, using a harness rated 2 or 3 times higher than required for a drogue chute deployed at apogee, a main harness sized too large for the forces it will see, or any harness that is much longer than required)
3) Aerodynamics and physics...
a) How many actually think about aerodynamics beyond CP & CG. Examples: Penetrations IN air-frame, protrusions FROM air-frame, airfoil considerations in fins beyond minimal leading edge beveling, et al.
b) How many look deeper into the physics as they apply. Examples: RFI/EFI, mass locations relative to air-frame center-line and how this affects trajectory, et al.
Have a wonderful week(end)!
1) Has anyone thought about or implemented a common "power bus" in their avbay? It seems logical (to me) to do so, but I have zero HPR experience. Seems like the benefits are many assuming your avionics are compatible.
It's one of those decisions that I need to make on the front end of the avbay design.
In my case, I am using Altus Metrum as the main vendor: TeleMega v5.0, and EasyMini v2.0.
Since both of these flight computers can function on 3.7vdc LiPo, a common power bus and ground plane seem reasonable.
a) Adds more redundancy: We use dual recovery hardware, but then power each with a single cell/battery. That doesn't seem like best practices for me, UNLESS risk is accepted to shave a few more grams by NOT having redundant power. In which case, you might as well go with a single system. To have redundant batteries with individual power buses requires 4 cells/batteries. With a common power/batt bus and ground plane, you can provide redundant power to both computers (and in my case all charges) with only the 2 cells/batteries you were going to use in the first place (caveat in 2)
b) Weight: You get redundant power at less weight (using two cells/batts that can power the entire load by themselves). Constructed properly, you could actually implement redundant power/ground buses/planes and still save a bunch of weight (IAW: you'd still have TWO switches, but each switch would turn on BOTH systems. Failure Case? Bad switch, failure of a conductor or connection somewhere.)
c) MANY ways to implement. Easy way is to simply use sufficiently sized bus wire in twisted pair with multiple connectors, but you could ALSO get creative and do it with double-sided (one or more copper-clad as required) PCBs (or custom etched boards). Use PCB strips with sufficient copper weight to provide equivalent wire size. I'm thinking a triangular or square tube as wide as the widest avionics board. Power on one side (likely inside) and ground (likely outside for several reasons on the other. Connectors soldered to the board for twisted pair harnesses to the avionics assemblies. Or build the tube from CF sheet and run the buses through the center bonded to the back of the CF strips.
d) The tube (I prefer the triangle in theory) forms the core of the avbay structure, mounting base for avionics & batteries, and I'm seeing a way to use composite rods with threaded metal tips bonded to them to carry power/ground to the pyro charges with as few as 3 rods and only three penetrations through the bulkheads (except perhaps an penetration for an antenna passthrough or an external antenna connection.
e) Designed properly, you could make it a module that could be moved from one diameter to another airframe.
f) If you can make the tube "hinged", you could size it to accommodate the entire power bus and batteries INSIDE, and the combination of a continuous ground plane (or CF), and/or twisted pair, can help significantly reduce/eliminate common mode and general RFI/EFI to the radio(s) and GPS. Hinged side is more weight, but cleaner, and moves more mass closer to the center-line of the air-frame.
g) ALL that metal that you use in the ground plane/bus adds to the ground planes on the individual PCBs, thus providing a much better return path for the antennas in the unit, thus generally improving their performance.
So many options... this is just a few off my brain-storming list.
2) Does anyone other than the min diameter folks and altitude chasers ever attempt to design to "specifications to accomplish mission, survive, and fly again" rather than "specifications to avoid all failure cases anticipated regardless of probability"?
I've been studying a lot of builds both here and elsewhere. It seems like there is a definite propensity to "over-build" resulting in a lot more mass than "necessary" and frankly a waste of thrust!
(For example, using a harness rated 2 or 3 times higher than required for a drogue chute deployed at apogee, a main harness sized too large for the forces it will see, or any harness that is much longer than required)3) Aerodynamics and physics...
a) How many actually think about aerodynamics beyond CP & CG. Examples: Penetrations IN air-frame, protrusions FROM air-frame, airfoil considerations in fins beyond minimal leading edge beveling, et al.
b) How many look deeper into the physics as they apply. Examples: RFI/EFI, mass locations relative to air-frame center-line and how this affects trajectory, et al.
Have a wonderful week(end)!