



Area66
Well-Known Member
- Joined
- Apr 5, 2013
- Messages
- 2,251
- Reaction score
- 4
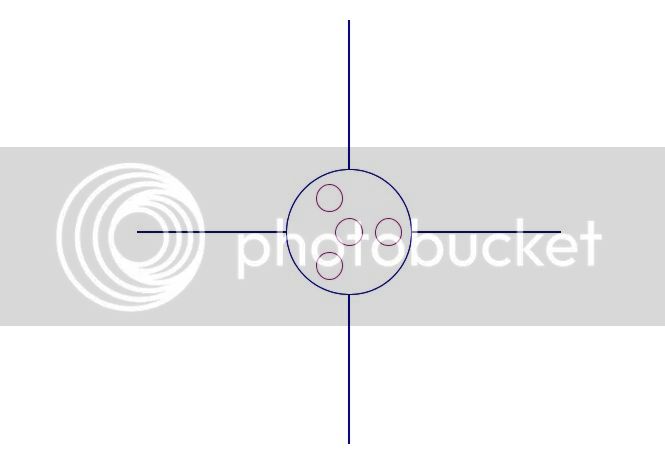
Ok I will work on a project involving active stabilisation with Gimbal. as I said in another post one of the problems of Canards and Guardian is the lack of processing power to anticipate the amount of correction needed to not over correct and create more problems. With Gimbal it will be the same problem except I think if we use a cluster of fix motors to surround the gimbal one. It will create some sort of inertia. The goal is to get a slow liftoff similar to real rocket send to space.
This is a long effort project, my weakness is the programing. But I have first to establish the goal and after it will be more easy to achieve it. First think, I was thinking to use a spherical bearing made of polymer, to hold the motor tube at his base and some sort of cam system to pivot the motor tube on the top.
I find some source in Europe nit it’s seem to not be popular here on in US

I think the best approach will be to make a rocket on a skeleton and use some king of skin over it , this will be more easy to work on a skeleton than force my hands in tube.
This is a long effort project, my weakness is the programing. But I have first to establish the goal and after it will be more easy to achieve it. First think, I was thinking to use a spherical bearing made of polymer, to hold the motor tube at his base and some sort of cam system to pivot the motor tube on the top.
I find some source in Europe nit it’s seem to not be popular here on in US
I think the best approach will be to make a rocket on a skeleton and use some king of skin over it , this will be more easy to work on a skeleton than force my hands in tube.
Last edited:
