



SpaceManMat
Space Nut
- Joined
- Dec 20, 2013
- Messages
- 702
- Reaction score
- 86
Yeah, I wanted to do a flight with the fix that proves I have actually solved the problem, so to be safe I’m after a setting to make sure a reoccurrence does not result in another early deployment.
I’ve gone over the configuration settings and came up with the following 3 solutions.
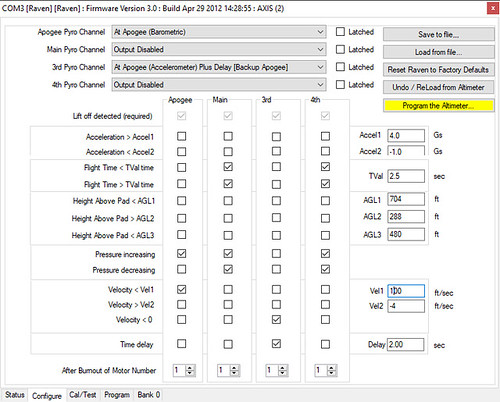
Option 1 - Lower the Mach lockout setting. I checked over my previous Raven flights and apogee typically occurs less than 50 feet/s, this flight peaked at around 230 feet/s. This should delay deployment until well past burnout and with the rocket well into the coast phase, at this stage the decaying speed should allow the pressure to start decreasing (this appears to have actually started in the previous flight but not soon enough to affect the altimeter logic)
Featherweight - Altitude Lockout on Flickr
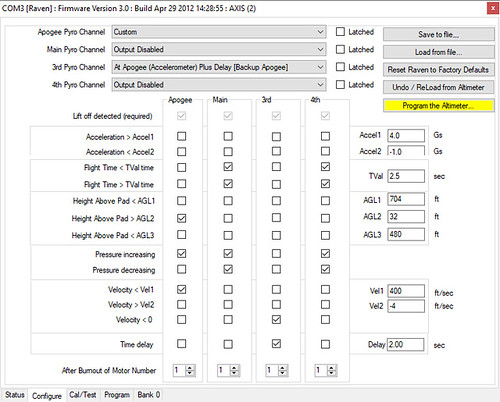
Option 2 - Altitude Lockout. I like the idea of this setting as it would be of no real consequence on pretty much any flight (deployment below 32 feet is not usually going to be successful) but if something weird happens with the ave bay being pressurised then it should hopefully save the day.
Featherweight - Altitude Lockout on Flickr
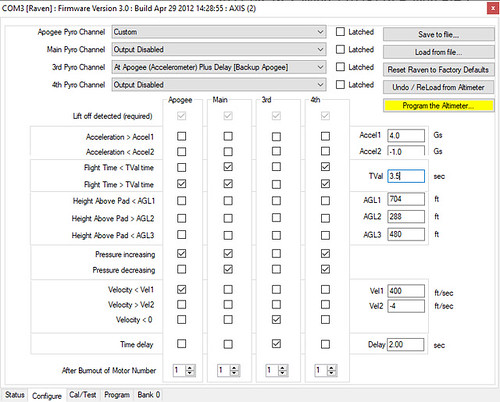
Option 3 - Time Lockout. The idea here is to wait about a second after burnout before enabling baro deployment, this should be reasonably safe with apogee occurring about 1.5 seconds after this.
I have to ask, for the Main and 4th channel why does the default setting use both Flight Time < TVal and Flight Time > TVal, how does that work?
Featherweight - Time Lockout on Flickr
I think without having a full flight of data to see how this anomaly would end, that the safest option is going to be the velocity lockout. I think this is the least likely to cause an issue over a variety of failures with this motor and rocket combination. There’s always the backup channel if this setting is too restrictive.
Thoughts?
I’ve gone over the configuration settings and came up with the following 3 solutions.
Option 1 - Lower the Mach lockout setting. I checked over my previous Raven flights and apogee typically occurs less than 50 feet/s, this flight peaked at around 230 feet/s. This should delay deployment until well past burnout and with the rocket well into the coast phase, at this stage the decaying speed should allow the pressure to start decreasing (this appears to have actually started in the previous flight but not soon enough to affect the altimeter logic)
Featherweight - Altitude Lockout on Flickr
Option 2 - Altitude Lockout. I like the idea of this setting as it would be of no real consequence on pretty much any flight (deployment below 32 feet is not usually going to be successful) but if something weird happens with the ave bay being pressurised then it should hopefully save the day.
Featherweight - Altitude Lockout on Flickr
Option 3 - Time Lockout. The idea here is to wait about a second after burnout before enabling baro deployment, this should be reasonably safe with apogee occurring about 1.5 seconds after this.
I have to ask, for the Main and 4th channel why does the default setting use both Flight Time < TVal and Flight Time > TVal, how does that work?
Featherweight - Time Lockout on Flickr
I think without having a full flight of data to see how this anomaly would end, that the safest option is going to be the velocity lockout. I think this is the least likely to cause an issue over a variety of failures with this motor and rocket combination. There’s always the backup channel if this setting is too restrictive.
Thoughts?
