Winston
Lorenzo von Matterhorn
- Joined
- Jan 31, 2009
- Messages
- 9,560
- Reaction score
- 1,748
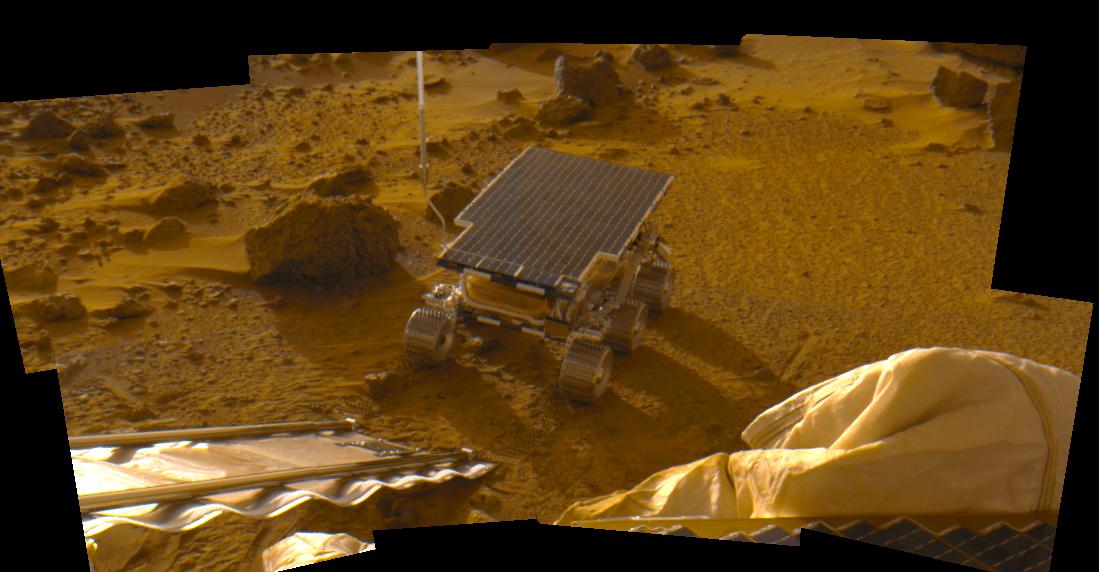
On July 4, 1997, NASA's Mars Pathfinder lander and Sojourner rover successfully landed on the Red Planet utilizing a revolutionary airbag landing system. This special 20th anniversary show chronicles the stories and the people behind the groundbreaking mission that jump-started 20 years of continuous presence at Mars.
Panel discussion interspersed with documentary video:
[video=youtube;XvVOgS9jWn0]https://www.youtube.com/watch?v=XvVOgS9jWn0[/video]
Although the mission was planned to last from a week to a month, the rover operated successfully for almost three months. Communication failed after 7 October, with a final data transmission received from Pathfinder at 10:23 UTC on September 27, 1997. Mission managers tried to restore full communications during the following five months, but the mission was terminated on March 10, 1998. During the extended operation a high-resolution stereo panorama of the surrounding terrain was being made, and the Sojourner rover was to visit a distant ridge, but the panorama was only about one-third completed and the ridge visit had not begun when communication failed.
The on-board batterydesigned to operate for one monthmay have failed after repeated charging and discharging. The battery was used to heat the probe's electronics to slightly above the expected nighttime temperatures on Mars. With the failure of the battery, colder-than-normal temperatures may have caused vital parts to break, leading to loss of communications.
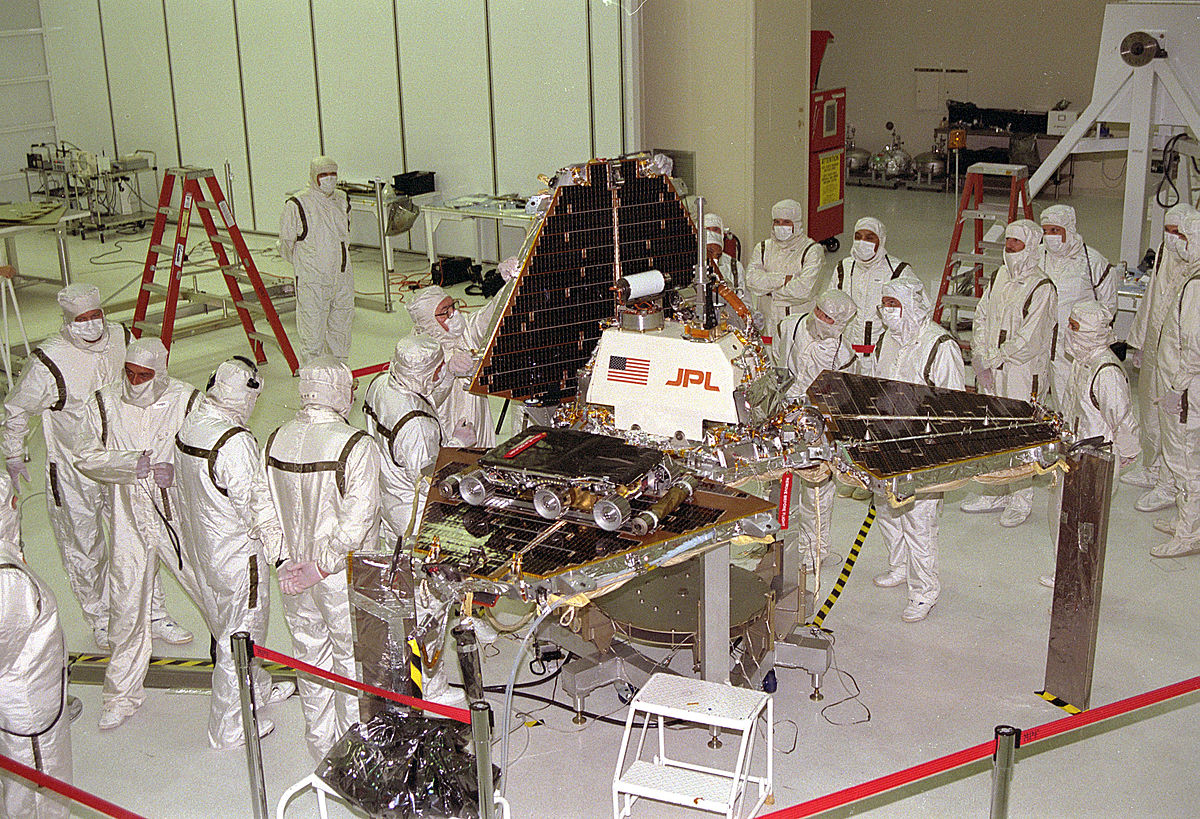
After the landing, Pathfinder was renamed as the Sagan Memorial Station in honor of astronomer and planetologist Carl Sagan. The mission had exceeded its goals in the first month.
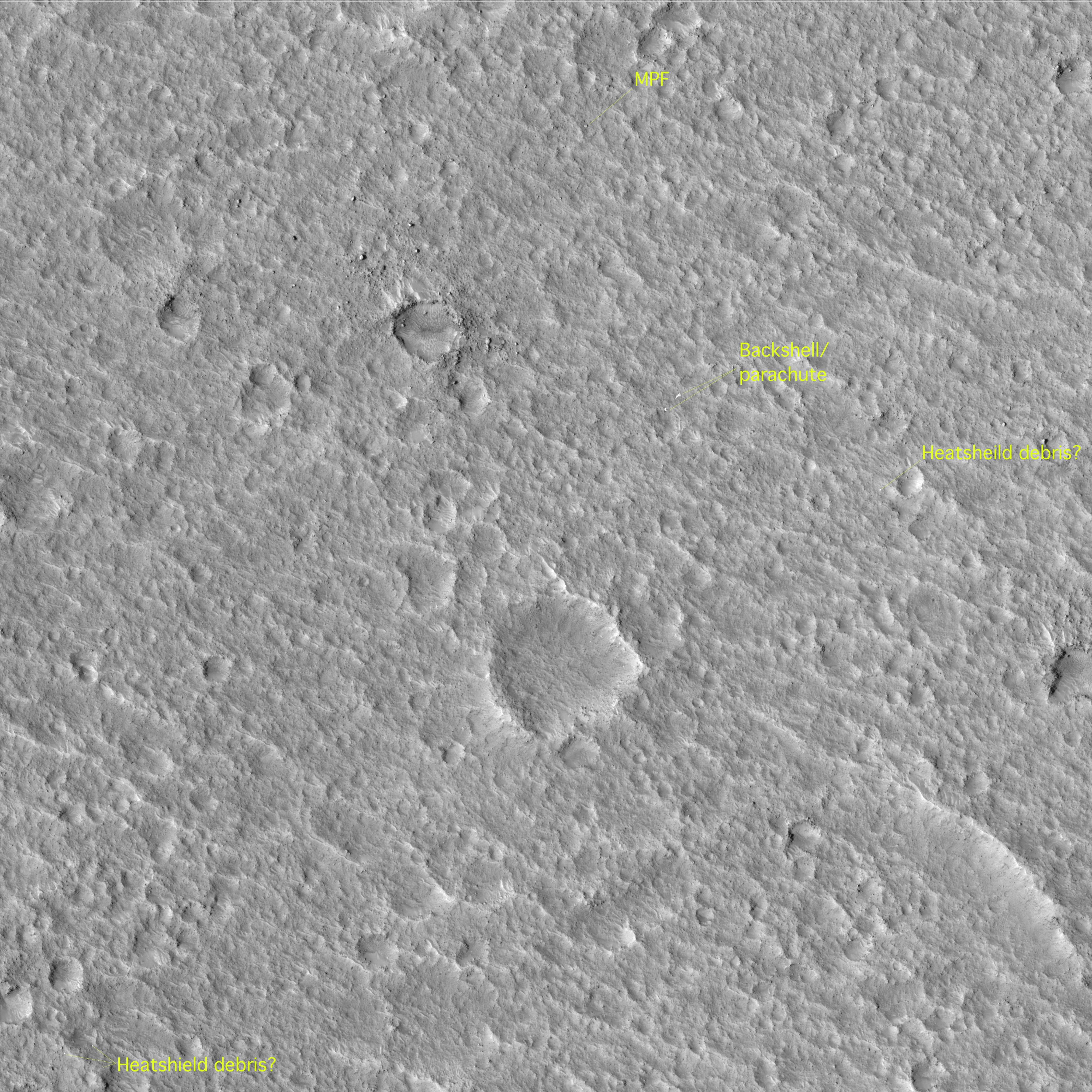
After the power failure on the lander, the solar powered rover would have continued to move around the lander every day in an attempt to reestablish comm with it until the rover itself died or got stuck and died. Too bad the winds and dust will have long ago erased its path by the time someone actually visits it.
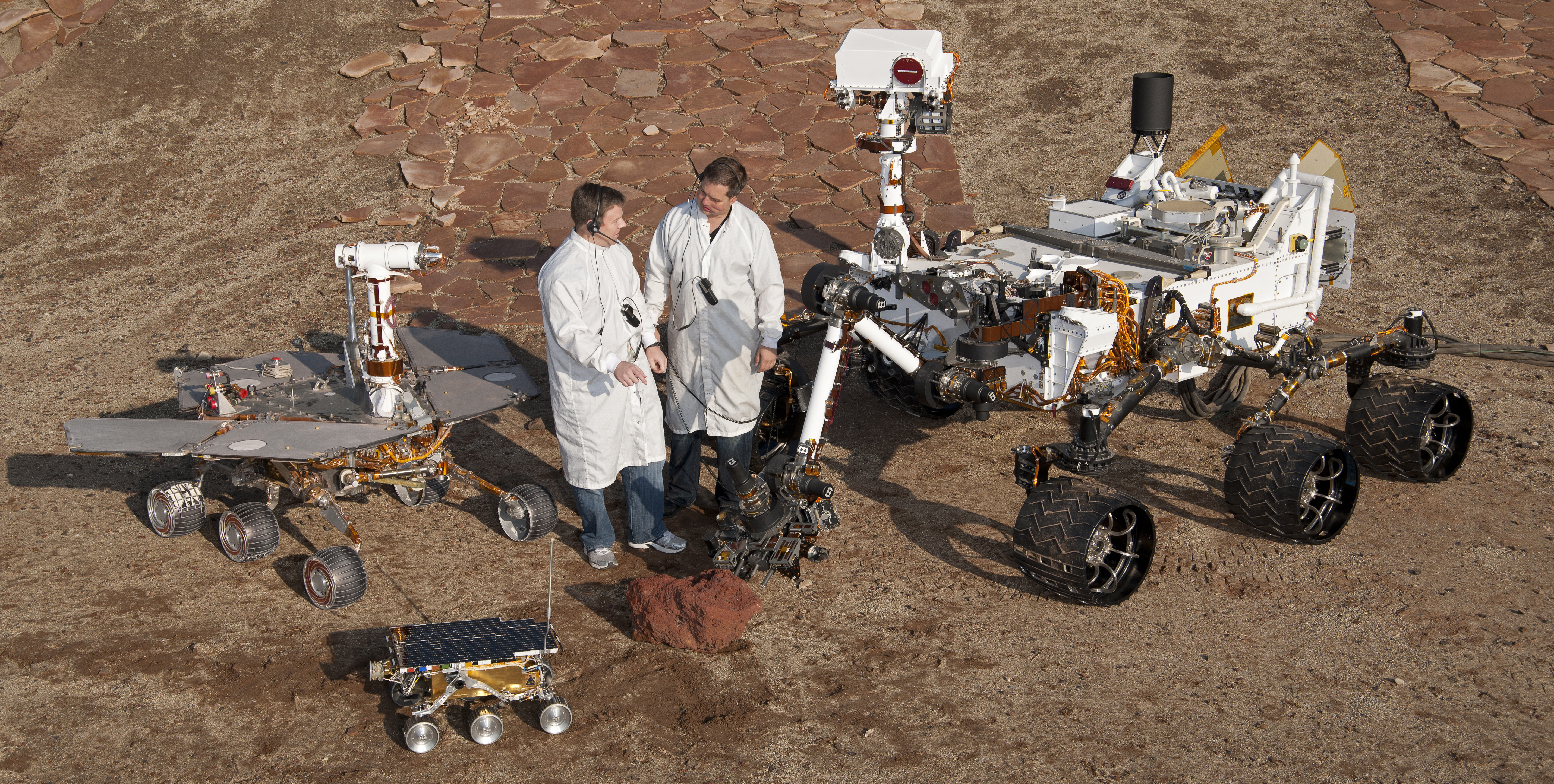
Pathfinder's Sojourner Mars microrover tech info.:
https://mars.nasa.gov/MPF/rover/faqs_sojourner.html
https://pdfs.semanticscholar.org/809e/ac1b3631634371ea68eef4b8778ad4235ae9.pdf
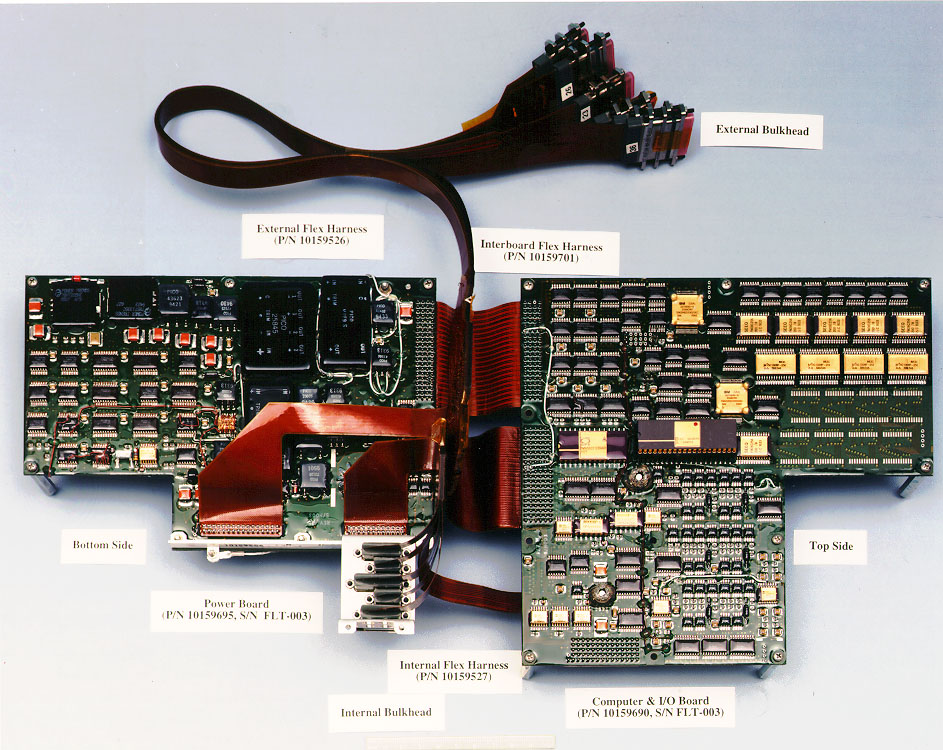
The power generated by the solar array and batteries is conditioned and distributed using a complex arrangement of Power Electronics. The electronics are fully integrated with the navigation and computer electronics to save money, space, and mass, and yet still provide more than ten different voltages to the various Rover hardware. Most of the power electronic components used are commercially available.
The 'Sojourner' rover has only a single CPU used in its operation. The computer is an 80C85 with a 2MHz clock rated at 100KIPS. It can address 64K of memory. The computer uses, in a 16Kbyte page swapping fashion, the memory provided in 4 different chip types:
16K - PROM, Harris 6617 - Boot code and 'Rover-Lite' backup code
64K - RAM, IBM 2586 - Main memory
176K - 5 each Seeq 28C256 32Kbyte rad hardened EEPROM - Programs, patches and nonvolatile data storage
512K - Micron MT1008 RAM - Temporary data storage
Rover electronics. Beautiful...:
Rover images:

Hopefully flying on the 2020 lander:
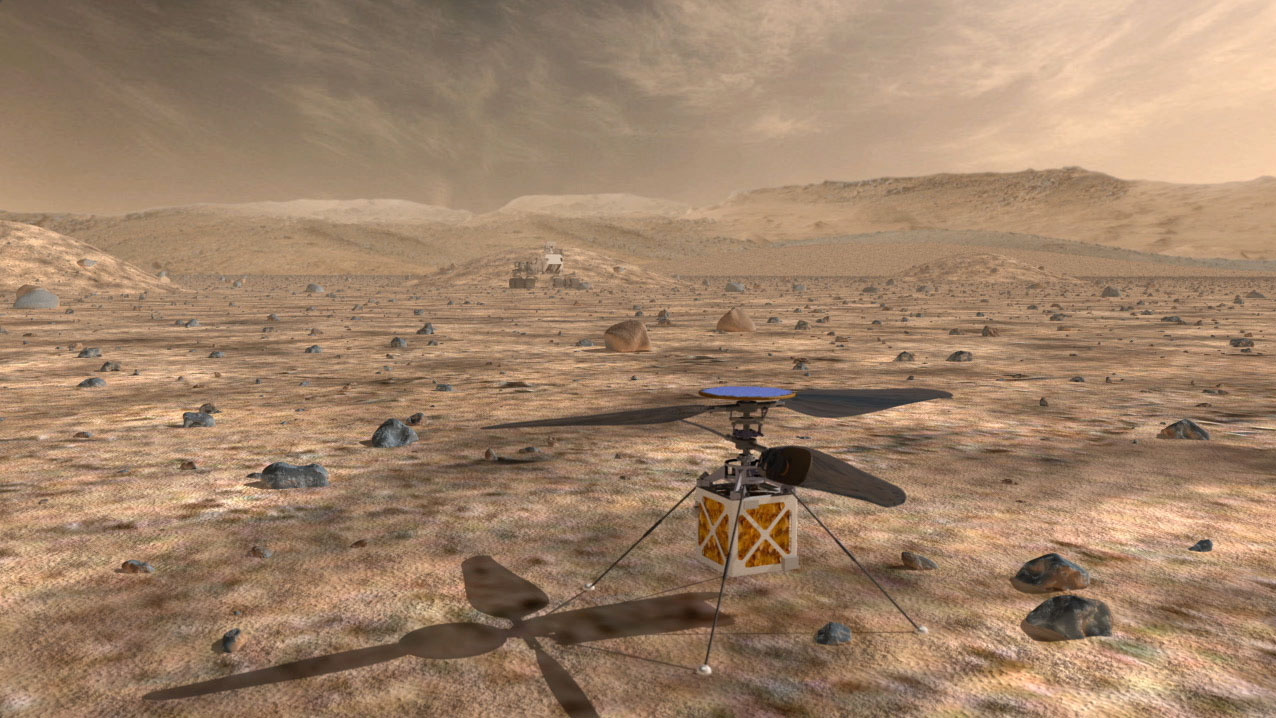
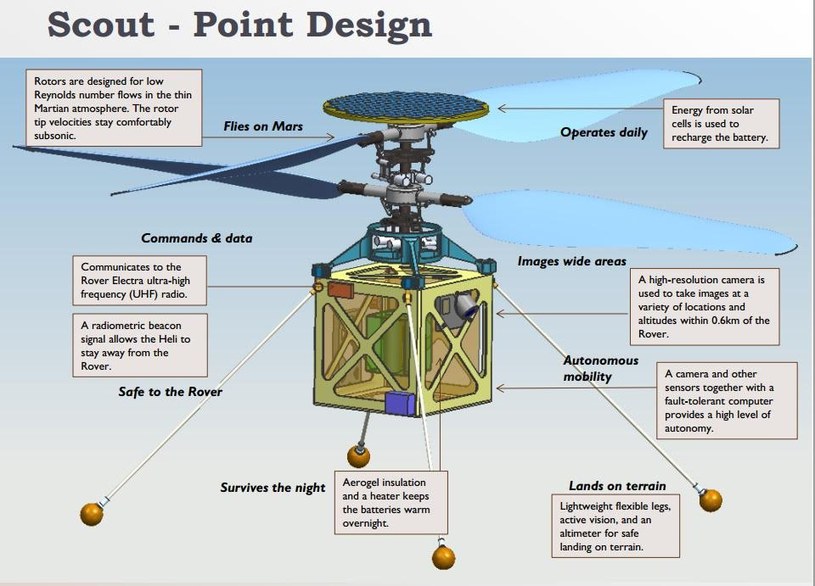
Mars Helicopter Scout
[video=youtube;w3y7iJEe7uM]https://www.youtube.com/watch?v=w3y7iJEe7uM[/video]
NASA Helicopter Could Fly on Mars
The U.S. House of Representatives has approved $15 million to continue development of a 2.2-pound NASA unmanned helicopter with twin contra-rotating blades designed to fly on Mars. The autonomous helicopter is slated to be included on a 2020 mission to the Red Planet and is designed to fly ahead of a surface rover for two to three minutes per day as a scout vehicle, before returning to the rover to recharge its solar batteries. Accounting for the low atmospheric pressure on Mars, the rotor disc of the proposed prototype spans 3.6 feet and supports a body that resembles a medium-sized tissue box and is hardened against solar radiation. The current design has been tested at NASAs Jet Propulsion Laboratory in Pasadena, Calif.
NASA says the Mars Helicopter could triple a rovers daily range by delivering visual information that will help engineers on Earth plan the best driving route. The rover will be specially instrumented to detect scientific indications of past or present life on the planet. Images from the helicopter could also be used to look for features for the rover to study in more detail and to select samples of rocks for a cache to be collected by follow-on vehicles.
Scientists have been working on the concept of a Mars Helicopter since the 1990s; however, early efforts were set back by the large size required, available battery technology and lengthy charging times.
Panel discussion interspersed with documentary video:
[video=youtube;XvVOgS9jWn0]https://www.youtube.com/watch?v=XvVOgS9jWn0[/video]
Although the mission was planned to last from a week to a month, the rover operated successfully for almost three months. Communication failed after 7 October, with a final data transmission received from Pathfinder at 10:23 UTC on September 27, 1997. Mission managers tried to restore full communications during the following five months, but the mission was terminated on March 10, 1998. During the extended operation a high-resolution stereo panorama of the surrounding terrain was being made, and the Sojourner rover was to visit a distant ridge, but the panorama was only about one-third completed and the ridge visit had not begun when communication failed.
The on-board batterydesigned to operate for one monthmay have failed after repeated charging and discharging. The battery was used to heat the probe's electronics to slightly above the expected nighttime temperatures on Mars. With the failure of the battery, colder-than-normal temperatures may have caused vital parts to break, leading to loss of communications.
After the landing, Pathfinder was renamed as the Sagan Memorial Station in honor of astronomer and planetologist Carl Sagan. The mission had exceeded its goals in the first month.
After the power failure on the lander, the solar powered rover would have continued to move around the lander every day in an attempt to reestablish comm with it until the rover itself died or got stuck and died. Too bad the winds and dust will have long ago erased its path by the time someone actually visits it.
Pathfinder's Sojourner Mars microrover tech info.:
https://mars.nasa.gov/MPF/rover/faqs_sojourner.html
https://pdfs.semanticscholar.org/809e/ac1b3631634371ea68eef4b8778ad4235ae9.pdf
The power generated by the solar array and batteries is conditioned and distributed using a complex arrangement of Power Electronics. The electronics are fully integrated with the navigation and computer electronics to save money, space, and mass, and yet still provide more than ten different voltages to the various Rover hardware. Most of the power electronic components used are commercially available.
The 'Sojourner' rover has only a single CPU used in its operation. The computer is an 80C85 with a 2MHz clock rated at 100KIPS. It can address 64K of memory. The computer uses, in a 16Kbyte page swapping fashion, the memory provided in 4 different chip types:
16K - PROM, Harris 6617 - Boot code and 'Rover-Lite' backup code
64K - RAM, IBM 2586 - Main memory
176K - 5 each Seeq 28C256 32Kbyte rad hardened EEPROM - Programs, patches and nonvolatile data storage
512K - Micron MT1008 RAM - Temporary data storage
Rover electronics. Beautiful...:
Rover images:
Hopefully flying on the 2020 lander:
Mars Helicopter Scout
[video=youtube;w3y7iJEe7uM]https://www.youtube.com/watch?v=w3y7iJEe7uM[/video]
NASA Helicopter Could Fly on Mars
The U.S. House of Representatives has approved $15 million to continue development of a 2.2-pound NASA unmanned helicopter with twin contra-rotating blades designed to fly on Mars. The autonomous helicopter is slated to be included on a 2020 mission to the Red Planet and is designed to fly ahead of a surface rover for two to three minutes per day as a scout vehicle, before returning to the rover to recharge its solar batteries. Accounting for the low atmospheric pressure on Mars, the rotor disc of the proposed prototype spans 3.6 feet and supports a body that resembles a medium-sized tissue box and is hardened against solar radiation. The current design has been tested at NASAs Jet Propulsion Laboratory in Pasadena, Calif.
NASA says the Mars Helicopter could triple a rovers daily range by delivering visual information that will help engineers on Earth plan the best driving route. The rover will be specially instrumented to detect scientific indications of past or present life on the planet. Images from the helicopter could also be used to look for features for the rover to study in more detail and to select samples of rocks for a cache to be collected by follow-on vehicles.
Scientists have been working on the concept of a Mars Helicopter since the 1990s; however, early efforts were set back by the large size required, available battery technology and lengthy charging times.