Update on current progress:
Project update time. First of all, my launch at Lake Louise ended up being a bust. Didn't have the electronics bay completed in time and was working on it in the cabin at the 11th hour, trying to get it together (seems to happen to me on occasion). Didn't quite manage it to a level I was comfortable with, also the winds blew hard during all of our high altitude windows anyway. No one was able to do any real high launches that weekend. Butter luck next year on that front.
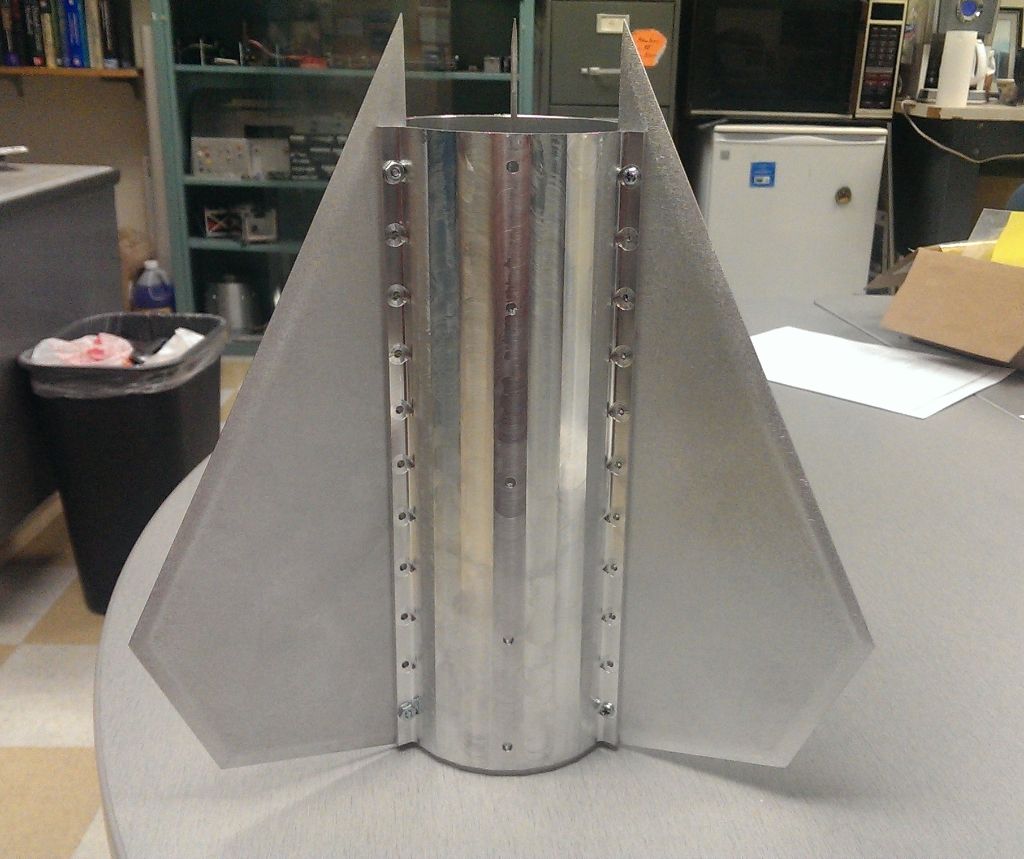
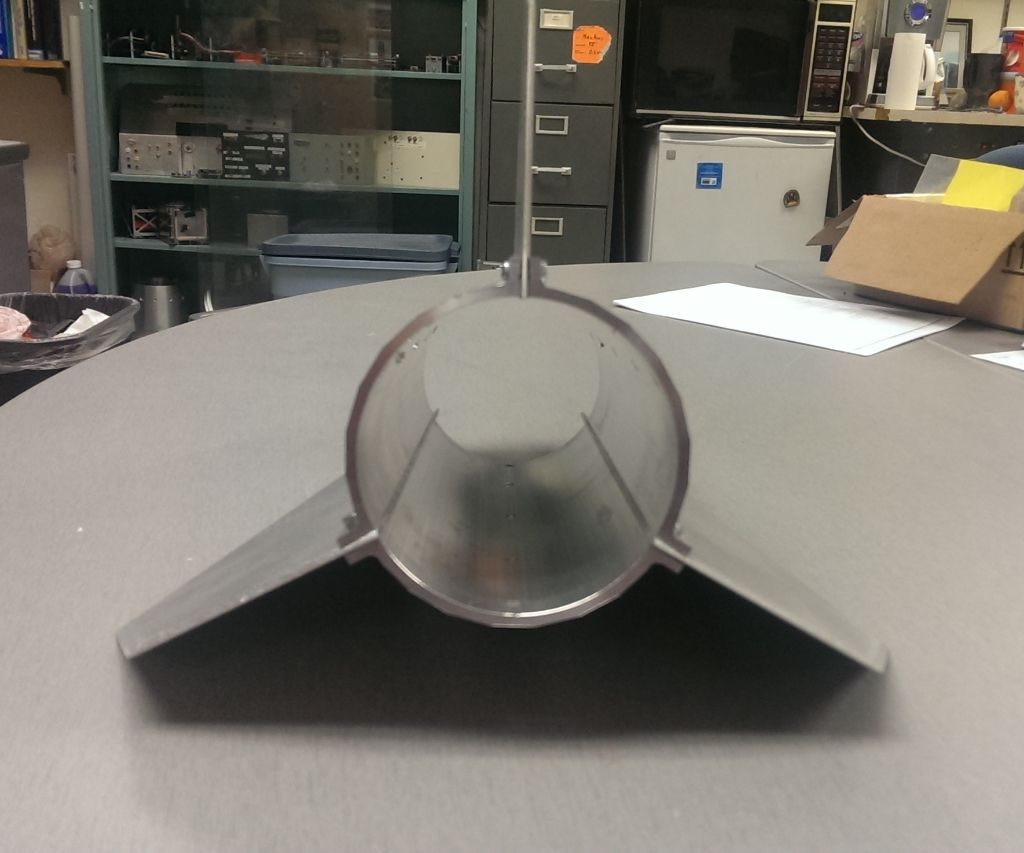
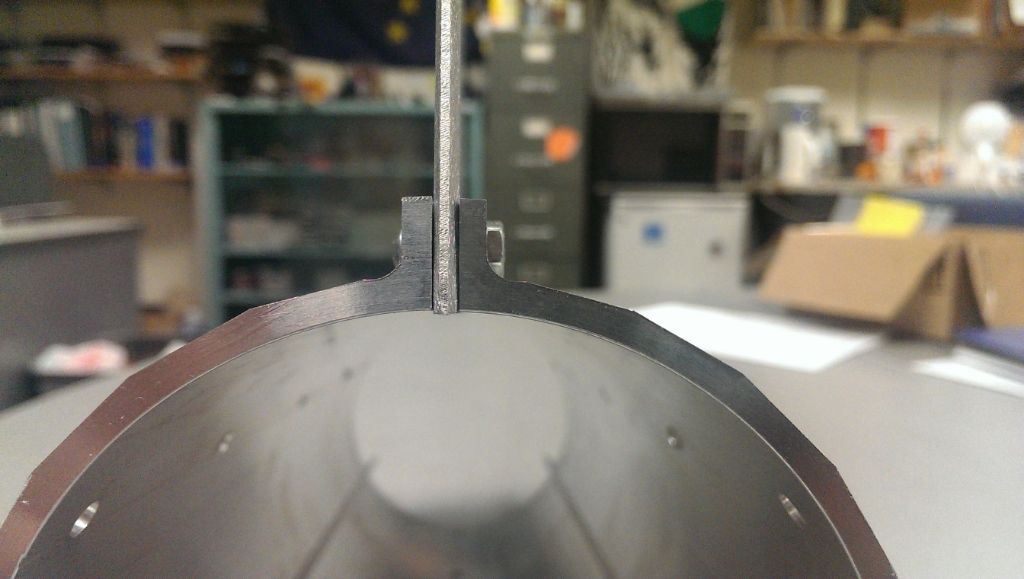
As far as rocket construction goes physically the rocket is complete aside from the electronics bay. I'll post an update on the build progress that I made either at the bottom of this post or in a few days when I get a chance. I will however add a picture of the finished product right now, and backfill in the details of what I did later.
So here is the current state of things!
This is a little bit old, there was lots of work done on the sustainer after this was taken.

Here is a picture of the completed product, with everything except for the electronics bay.

New Project Goal:
Now for the new and exciting news. Since I restarted this thread Scott from Loki Research and I have been collaborating on teaming up for possible EX motors for this rocket to fly at BALLS this year. Recently things have fallen into place, letting us pull the trigger on the teaming. So now the next plan is to fly this rocket at Balls this year, and try to hit
150,000 ft.
I would have preferred to have gotten a flight in to ~50k first on the rocket. I don't particularly like pushing the boundaries so much on an untested system. But sometimes you just have to take the opportunities that you get. This does mean I'll be doing a bit more ground testing of systems than I would have normally done. After-all I'm only increasing my personal previous max altitude by an order of magnitude, what's the big deal?

The motors we decided on are a 98mm O-2650, which will be run in a CTI 98mm 6GXL case for the booster. Then a 54mm ~M-1400 in a Loki 54/4000 case for the sustainer.
So the general idea is to pack as much motor as possible into each stage and see what happens. It's going to be a bit more complicated than that in practice of course. There were some ideas floated around for even larger motors but keeping the time that is left in mind, these were safer options to fly without being able to do much motor testing.
Here are some conservative preliminary simulations on the rocket's performance:
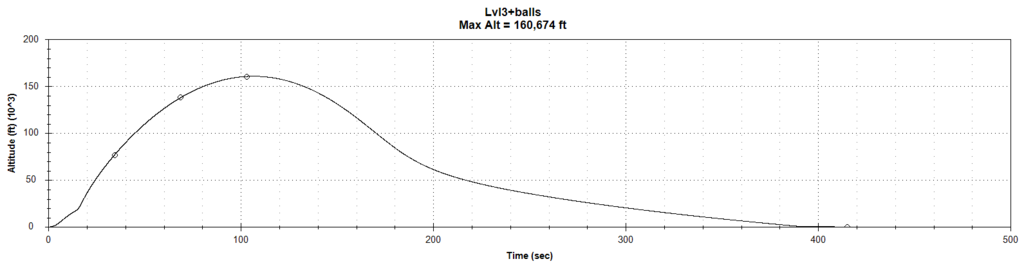
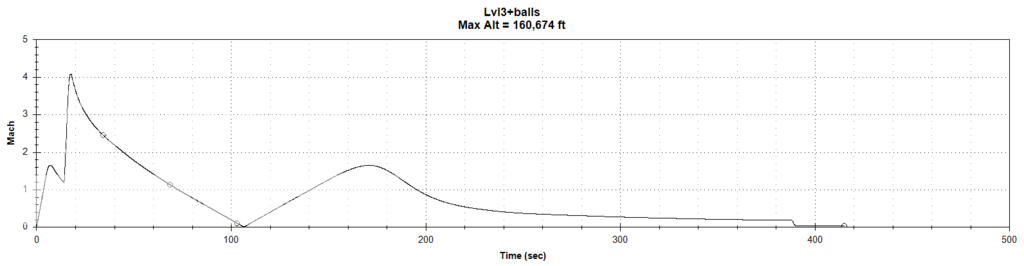
The real value is going to be quite a bit lower, since the sims are not taking into account some fairly large sources of drag that are present on the actual rocket. I am planning on going through the rocket doing some drag reduction procedures.
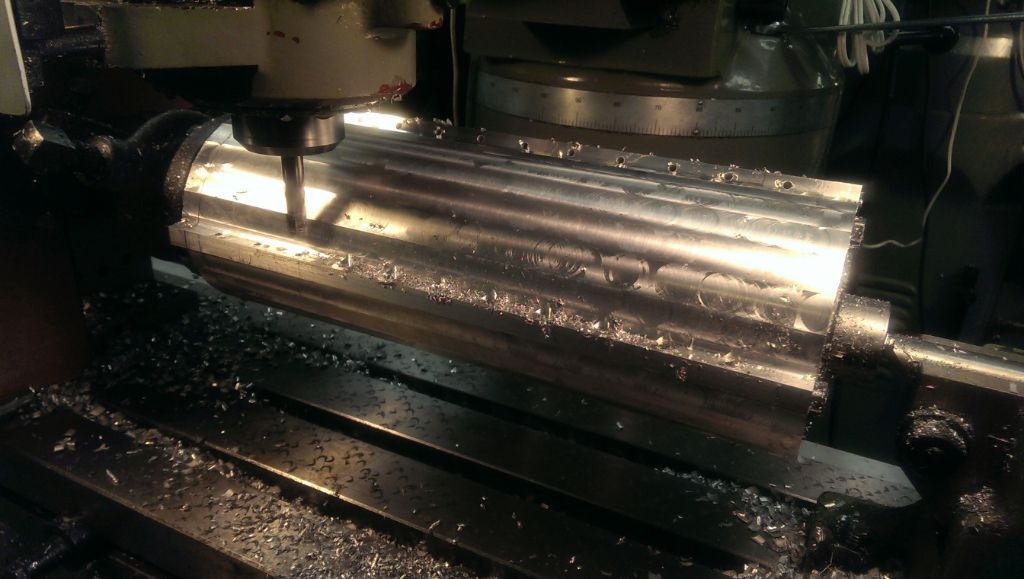
There is a bit of work that needs to be done to get the rocket ready for a launch like this. Largest item is I need to swap the fincan over from the current 76mm motor mount tube, to a longer 98mm motor mount tube.
Here is the list of things I am planning on doing:
Structure:
- Replace booster motor tube with a 60" 98mm fiberglass Motor tube
- Replace current fiberglass sustainer motor tube with a 60" 54mm carbon fiber tube
- Apply 1-2 plys of kevlar to sustainer avionics bay and nosecone
- Complete 3d printed avionics bay sled
- Apply Dow Corning 3-6077 ablative to high heat load areas.
I'm fairly certain the booster will be just fine staying as fiberglass and in its current configuration. The booster has flown to mach 1.5 and 15k feet as my level 3 rocket. The O motor we are using doesn't have a whole bunch more thrust than the M1500G that it has flown on previously and the speed peaks out at mach 1.6. So I think the fiberglass can handle the new aeroloading just fine. The extra ~20lbs of weight on the nose of the tube is a new one however. I am not entirely sure I am going to fly the booster as a Dual Deploy. I'd like to remove one joint to make the rocket motor rigid overall, and just deploy the main parachute at apogee. Since we are at blackrock I think there should be plenty of space to recover the booster even if I deploy the main chute at ~14,000 feet. My chute size makes the rocket come in a bit hot anyway since it was designed for landing on snow. I'll be doing some more sims on it to see exactly how high my booster is going to go before I decide.
I want the extra rigidity since small perturbations on my boost phase I am pretty sure will have some pretty large results on my sustainer in bringing things off course. The added weight of the sustainer and interstage is also going to make things more wobbly than they were with only a nosecone on the top.
The sustainer I know I need to beef up, the fiberglass tube is pretty thin, and a bit marginal for doing above mach 3. At mach 4+ I need to do more. For the motor tube I am planning on replaceing the fiberglass one with a carbon fiber tube, to give me extra safety margin and lower the weight as much as possible. My electronics bay needs to be radio transparent, so I am planning on reinforcing the existing fiberglass with some Kevlar. I'd like to overlap the Kevlar over the aluminum nose tip. I currently have it potted in JB Weld to keep it from moving, but I really don't want this rocket to fail because the JB weld softened and my nosetip fell out of alignment.
Then to keep my composites from peeling from the mach 4+ at 27,000 feet I am going to put 3-6077 ablative on the forward exposed surfaces. I still need to investigate its post cure work-ability and if it is still radio transparent even when charred. As if the radio transparency goes away I will have to reconfigure my av bay to move my antennas out of the nosecone. I know the stuff will be more than sufficient for any heating loads I would get. The other application I know it is used in protects very well against from getting hit by a 250,000 lbf solid motor exhaust from 1 foot away. I cant imaging any kind of aeroheating that could be worse than that so it should be just fine in this application.
Electronics:
I do need to revamp my telemetry link some. At 30 miles for apogee the wire antenna and 89mW transmit power out of the telemega isn't going to cut it. I could get a more directional receive antenna, but if I lose sight of the rocket (which I will trying to find a tiny 54mm dart at 150k feet) I can eaisly lose track. So my plan is to add in a power amplifier, dipole antenna (doesn't need a ground plane), and a Z match to boost the transmit power of the telemetry unit to at least 1000 mW.
I am also planning on boosting the receive side of things as well, perhaps an omni ontop of a long pole. It would be nice to be able to get GPS tracks when the rocket is on the playa; which from my understanding is a pretty serious radio attenuator. I'm planning on doing some testing up here before I go down to see what my receive range is, that will help me determine if I can get away with an omni antenna atop a tall pole, or if I need to get a more directional yagi to make it work.
The M-1400 will be head end ignition which is going to simplify my wiring issues.
I'm currently working on getting my class 3 packet together right now to submit as soon as I can. I want to get it in as far as I can ahead of the deadline.
Whatever the result this should be a rather interesting adventure!