RGClark
Mathematician
Princeton's rocketry lab plans to make an attempt at a flight past the 100 km von Karman line for space in May, 2018 using a two-stage rocket. Interestingly, they intend to use commercial motors for both stages. If they succeed, this would be the first time commercial motors available to amateurs were used for a flight to suborbital space.
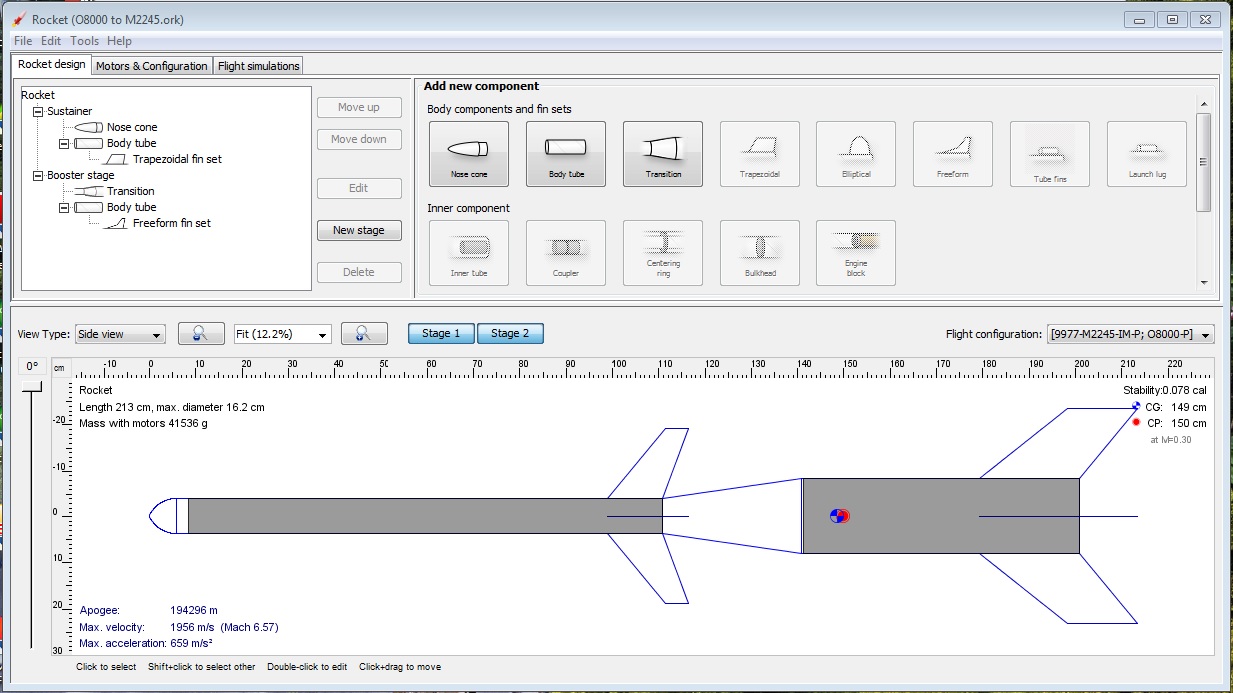
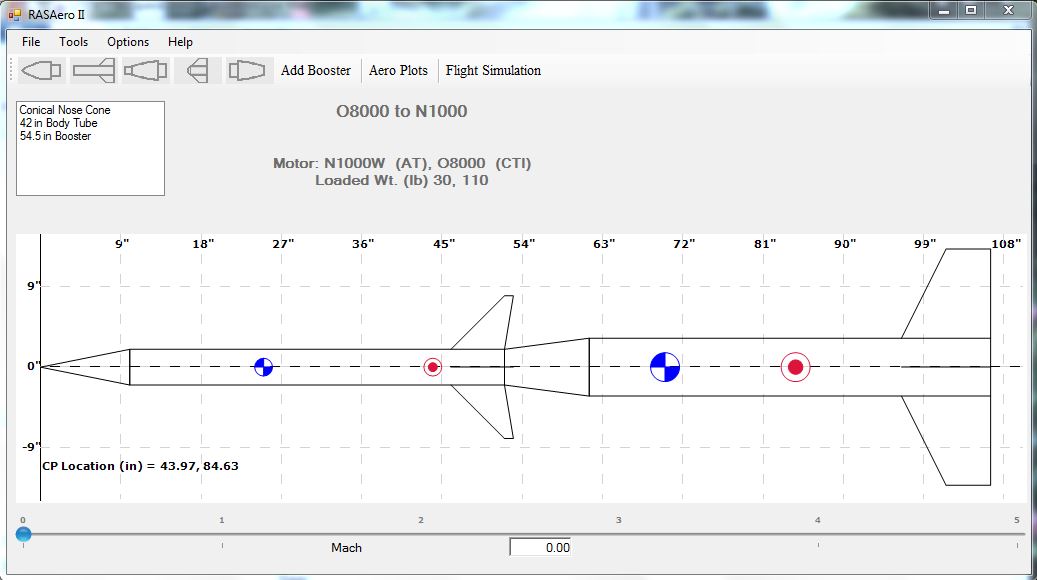
In that vein I modeled such a rocket using an O8000 booster and N1000 sustainer with both RASAero and OpenRocket. I was quite surprised when RASAero returned a result well in excess of the 100 km line for suborbital space. The OpenRocket result was a more conventional 8 to 9 km though.
I'm just starting to work with these programs however, and I'm requesting some feedback on the validity of these results.
The RASAero sim is available here:
O8000 to N1000.CDX1
https://drive.google.com/open?id=1Frz2nqyrv6l85HoI1VF2N-MX3zwZhqX6
The OpenRocket sim is here:
O8000 to N1000.ork
https://drive.google.com/open?id=1yllGlIGGnOVKJh5tLtA4tUY_3JoVnwS7
Image from the RASAeros sim using a CTI O8000-P for the booster and an Aerotech N1000W for the sustainer:
Bob Clark
In that vein I modeled such a rocket using an O8000 booster and N1000 sustainer with both RASAero and OpenRocket. I was quite surprised when RASAero returned a result well in excess of the 100 km line for suborbital space. The OpenRocket result was a more conventional 8 to 9 km though.
I'm just starting to work with these programs however, and I'm requesting some feedback on the validity of these results.
The RASAero sim is available here:
O8000 to N1000.CDX1
https://drive.google.com/open?id=1Frz2nqyrv6l85HoI1VF2N-MX3zwZhqX6
The OpenRocket sim is here:
O8000 to N1000.ork
https://drive.google.com/open?id=1yllGlIGGnOVKJh5tLtA4tUY_3JoVnwS7
Image from the RASAeros sim using a CTI O8000-P for the booster and an Aerotech N1000W for the sustainer:
Bob Clark
")