I have a couple of quadcopters, but I think of them more as supporting my photography hobby. They don't require much skill to fly (you basically just tell them where to go). Sometimes, I fly one just for fun, but not often. If I had the time, I think I'd enjoy building a larger one from the large selection of parts available and tinkering with it. Also, if I had the time, I'd love to build, and learn to fly, a traditional R/C helicopter. Since I don't have the time, I'll just read about the cool stuff George is doing!
")
Thanks. As a kid, I dreamed of building an R/C Lunar Module that could take off and fly for maybe 30-60 seconds on rocket power and land before running out of fuel. But that wasn't possible at the time, and the rocket engine portion is still way out there for a hobbyist project (maybe a micro throttleable hybrid. But I can fly this model nearly 10 minutes for maybe 20 cents, 19 cents being the eventual replacement cost of the battery pack).
I got the chance to try out a multicopter (Quad) 4 years ago, got into it 2 years ago when I built my own. I could never handle an R/C helicopter, never tried a "real" one, tried some on a RealFlight simulator and could fly it for awhile but eventually lost orientation. I don't ever try flying a multicopter in full manual or "Acro" mode. Always with self-stabilization on to keep it level. Not into the "Quad Racing" thing for myself, though I have watched some races on video. And the 250 Quad I made is a "racing quad frame", just I'm not using it that way.
I do like flying them for fun. Most ironically, when the wind is up and would be no fun at al ro fly a plane, I can take my 250 Quad out and fly it since it is not as affected by wind gusts as planes are. And if the GPS and compass are working fine, then it can stay in place (Loiter), not get blown downwind.
I do want to use onboard cameras to take good video/photos. A few months ago I got into FPV, which helps in being able ot see where the camera would be pointing. I have access to a Blade 350 QX and GoPro, and have done some testing with that. But the Blade 350 wobbles about a bit, particularly in wind, the video was shaky. I have a $70 Walkera G-2D gimbal I'll be adding to it to get better video. I can even use a 7th channel to tilt the gimbal up and down in pitch. However, the Blade 350 does not have a 7th channel. The only way I can do that without replacing the Blade 350's combined receiver/Flight Computer board is to carry a 2nd receiver and use a 2nd transmitter. Which I may do for awhile. But the Blade 350 is limited in its duration, about 5 minutes, and there's some other annoying issues, so not a good long-term solution (I'd also like to use it to try to find lost models, but that's not much flying time to search and come back to land).
So, what I hope to do this fall is to build my own Aerial Photography Quad. Mostly using the same power system (ESC's, motors/props) as the Lunar Module model. About the same motor span (about 600 mm, or 24") and probably same square graphite tubing for the arms. But way lighter since it won't have the Lunar Module parts, just whatever is needed to have a reasonably strong structure and tall-enough sturdy landing gear to protect the camera and gimbal. I know it won't be as good for automated video as a Phantom-3 pro (or 4) with Lightbridge, but far less expensive and more modifiable. I really like the Arducopter / Mission Planner software for programming the Flight Controller for various features and settings. It also does pre-programmed flight patterns and maneuvers, but that's not as easy to do live out at the field as it is to do at home, so some of the commercial multicopters are more practical to do some things
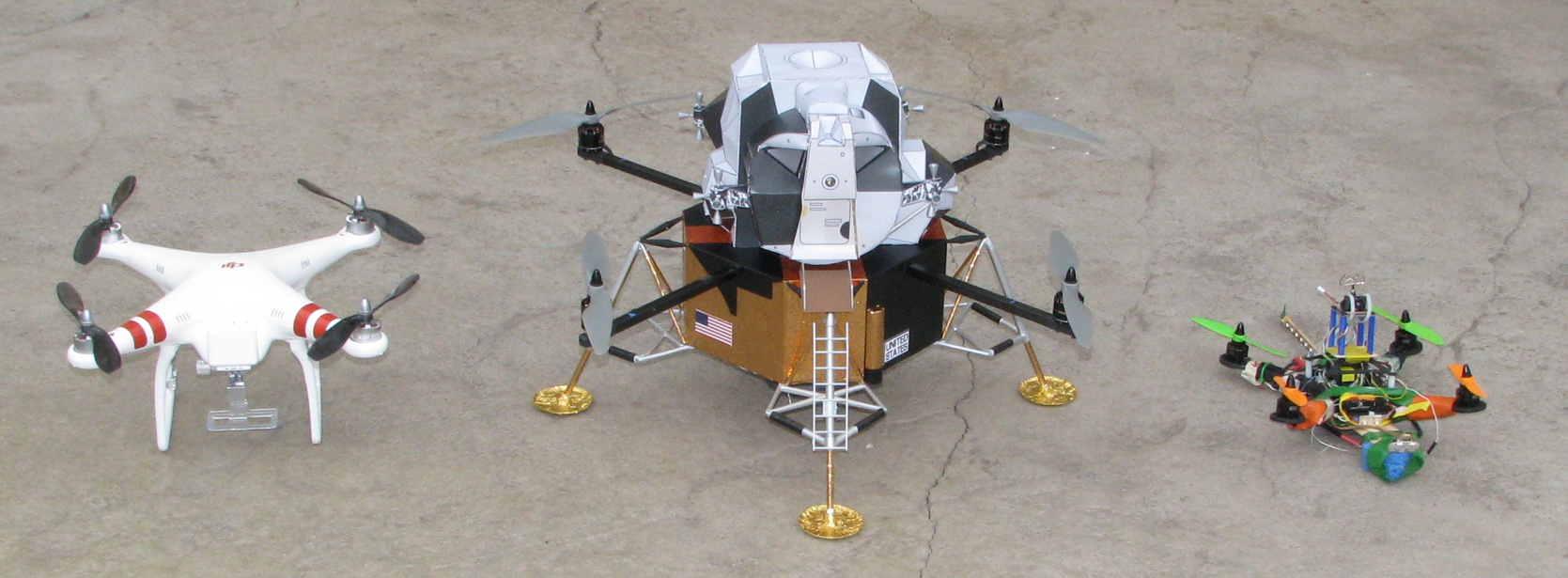
FWIW - I took this photo to give an idea of size. A borrowed Phantom-1, Lunar Module, and my 250 Quad (which has GPS and a tiny FPV camera on it, among other things).