


- Joined
- Jun 4, 2010
- Messages
- 888
- Reaction score
- 352
Using your example, if I have a motor that produces a thrust that 2x the weight of the rocket, the accelerometer will read 2g as you say. Assuming drag is negliable this will be a direct calculation of motor thrust , T=ma, where m=mass of the rocket, a=acceleration recorded by the accelerometer with the 1g offset applied.
In this case, thrust = 2x weight of rocket, you will get this same 2g accelerometer reading if the rocket is going vertically up, totally horizontal (perpendicular to the gravity vector) or straight down. Gravity is not affecting the raw accelerometer reading in each of these three cases because the readings will all be identical.
Using your example, if I have a motor that produces a thrust that 2x the weight of the rocket, the accelerometer will read 2g as you say. Assuming drag is negliable this will be a direct calculation of motor thrust , T=ma, where m=mass of the rocket, a=acceleration recorded by the accelerometer with the 1g offset applied.
In this case, thrust = 2x weight of rocket, you will get this same 2g accelerometer reading if the rocket is going vertically up, totally horizontal (perpendicular to the gravity vector) or straight down. Gravity is not affecting the raw accelerometer reading in each of these three cases because the readings will all be identical.
Here's what the accelerometers in your situations will read:
If up, reads +2g in direction of rocket [up] (2mg thrust - mg = 1g up + 1g gravity = 2g)
Even though rocket accelerates 1g in direction of rocket (up)
If upside down, reads +2g in direction of rocket [down] (2mg thrust + mg = 3g down - 1g gravity = 2g)
Even though rocket accelerates 3g in direction of rocket (down)
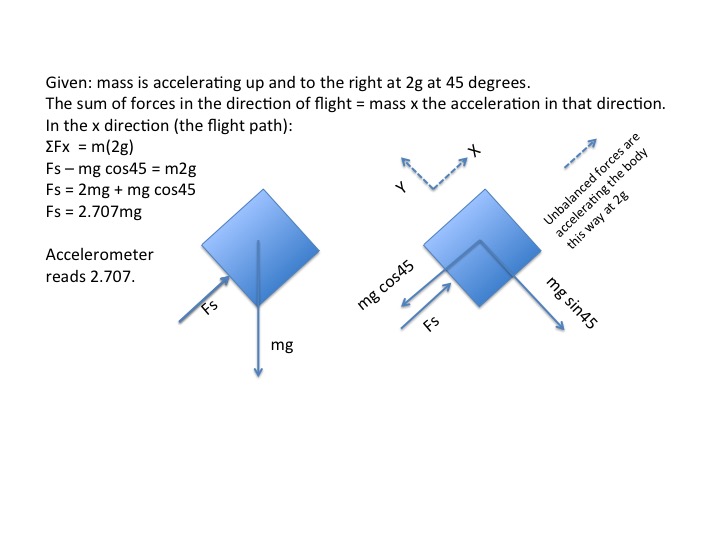
If sideways to the left, reads +2.236g, 30 degrees up from sideways (2g to the left, 1g gravity up, sqrt(2g^2 + 1g^2)=sqrt(5g)=2.236g),
Even though the rocket accelerates straight to the side at 2g
In none of these cases can you read the accelerometer reading and infer the correct rocket motion relative to the earth unless you properly "back out" the gravity that was measured in the proper direction.
I think you are saying that because the accelerometer in both the up/down cases reads 2g, that it can't sense gravity. Not true. Because in neither case is the rocket accelerating at 2g. To get to true earth-referenced motion, you need to back out the 1g of gravity that the accelerometer sensed. In the up case, you subtract it (gravity acts in opposite direction of rocket), in the down case you add it (gravity acts in the same sense as the rocket). If you don't properly compensate for the gravity that the accelerometer DID MEASURE, you can't get the proper motions of 1g and 3g (in the direction of the rocket) that were actually occurring.
At any angle other than vertical (where gravity and the motion of the rocket are aligned) it starts to get hard to "back out" the 1g part of the reading (always pointing up) caused by gravity.
If you think that a rocket accelerating sideways at 2g only reads 2g on a 3D accelerometer, you are mistaken. There will be a 1g reading on what is now the vertical axis as well. The total magnitude will be 2.236g, at the combined angle of 30 above horizontal. 2g sideways + 1g vertical.
Here's the drill:
1. Get the accelerometer reading
2. "Back out" gravity effect in the vertical direction
That gives you the true rocket motion. No other way to do it.





") . Can you tell me how gravity is being measured in these examples?
. Can you tell me how gravity is being measured in these examples?