Hi!
After my first post here ( https://www.rocketryforum.com/showthread.php?127790-what-could-go-wrong ) I studied more and:
1) Ordered the handbook of model rocketry as suggested (but will only receive it by the end of the month)
2) Bought a small rocket and made a static test with an A6-4 engine (because I didn't find a proper place to test it yet)
While I don't receive/read the book, I defined my first goal in rocketry (after successfully launching this rocket I bought):
Make a self-stabilizing rocket (using controlled fins) that can reach at least 500 meters
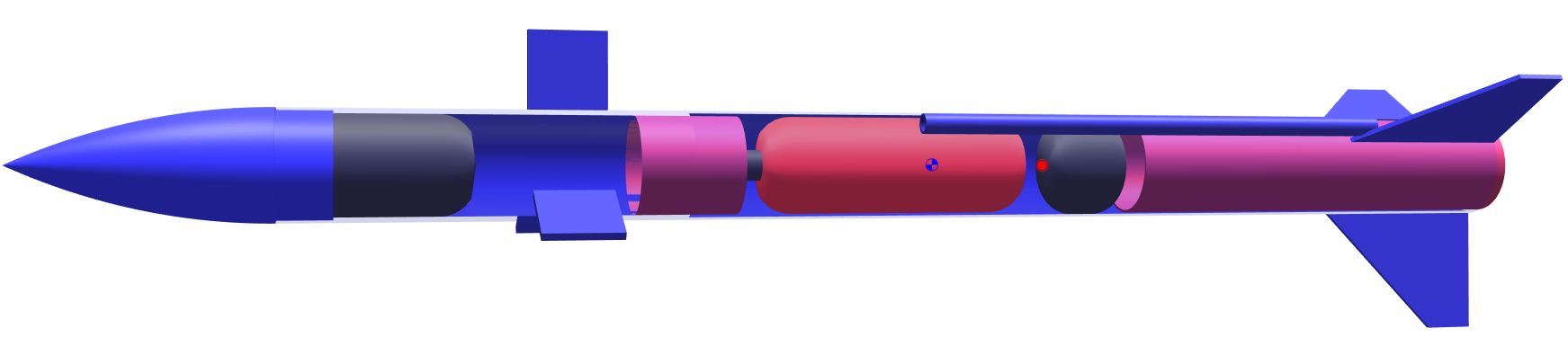
I'm playing with OpenRocket and ended up with the following design. Now I'd like your opinion on this.
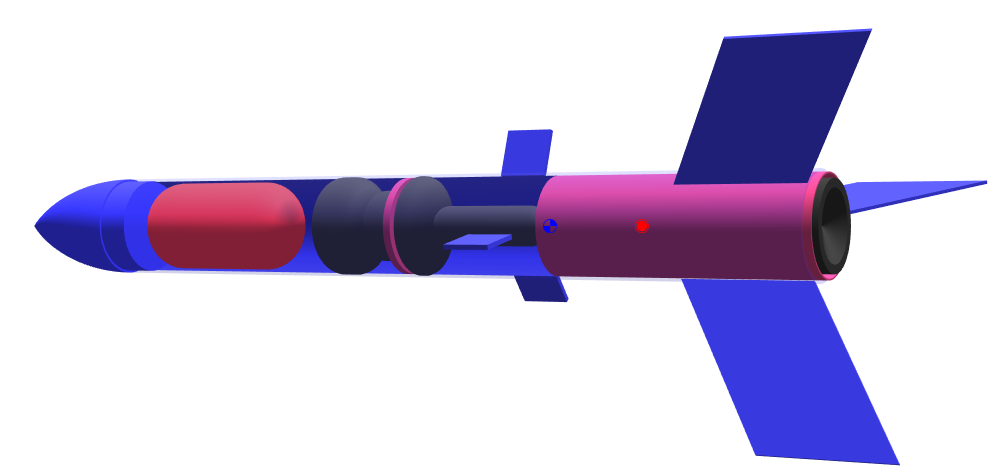
From bottom to top, that's how I imagine it:
1) 3 static fins (probably made of some PVC plastic - like a credit card)
2) Body tube of 65mm outer diameter PVC (2mm thick), length 500mm
3) Engine (I'm making simulations with an I engine (which reachs 1000m height and about 240m/s), but I'll probably start with a C and move at most up to a G)
4) Bulkhead
5) 3 servos + arduino + IMU + small fins (3x3cm)
6) Thick Bulkhead
7) Black powder (to be triggered by the arduino when the IMU detects it's falling)
8) Wadding
9) Parachute (80cm diameter)
10) Nose cone + 9V battery
So, now I need to ask you again "what could go wrong?".
Some unresolved issues I have:
1) I need to calculate the air drag in the control fins to see if the attachment to the servos can handle it depending on the speed. I'm guessing it can since they are small and I don't plan on moving them more than 45 degrees). I guess I'll have the tools to calculate this when I receive the book (I already checked it has a chapter on air drag") ). Also, the control fins size (3x3cm) is a guess.
). Also, the control fins size (3x3cm) is a guess.
2) Find a good way to attach the servo to the fins
3) How thick to make the bulkheads so the arduino supports the heat from the motor and the black powder explosion (I'm guessing about 1 gram, but I need to do more tests)
4) How to make the nose cone
5) How to attach the static fins to the body (I'm tending to go with soldering + epoxy)
If everything works as I expect, my plan is to reduce the size of the static fins to the point that the CP goes closer to the CG, as long as the stabilization is working
So, can you see any obvious breach on this idea? Any similar projects I can steal some ideas from?
Thanks
After my first post here ( https://www.rocketryforum.com/showthread.php?127790-what-could-go-wrong ) I studied more and:
1) Ordered the handbook of model rocketry as suggested (but will only receive it by the end of the month)
2) Bought a small rocket and made a static test with an A6-4 engine (because I didn't find a proper place to test it yet)
While I don't receive/read the book, I defined my first goal in rocketry (after successfully launching this rocket I bought):
Make a self-stabilizing rocket (using controlled fins) that can reach at least 500 meters
I'm playing with OpenRocket and ended up with the following design. Now I'd like your opinion on this.
From bottom to top, that's how I imagine it:
1) 3 static fins (probably made of some PVC plastic - like a credit card)
2) Body tube of 65mm outer diameter PVC (2mm thick), length 500mm
3) Engine (I'm making simulations with an I engine (which reachs 1000m height and about 240m/s), but I'll probably start with a C and move at most up to a G)
4) Bulkhead
5) 3 servos + arduino + IMU + small fins (3x3cm)
6) Thick Bulkhead
7) Black powder (to be triggered by the arduino when the IMU detects it's falling)
8) Wadding
9) Parachute (80cm diameter)
10) Nose cone + 9V battery
So, now I need to ask you again "what could go wrong?".
Some unresolved issues I have:
1) I need to calculate the air drag in the control fins to see if the attachment to the servos can handle it depending on the speed. I'm guessing it can since they are small and I don't plan on moving them more than 45 degrees). I guess I'll have the tools to calculate this when I receive the book (I already checked it has a chapter on air drag
). Also, the control fins size (3x3cm) is a guess.2) Find a good way to attach the servo to the fins
3) How thick to make the bulkheads so the arduino supports the heat from the motor and the black powder explosion (I'm guessing about 1 gram, but I need to do more tests)
4) How to make the nose cone
5) How to attach the static fins to the body (I'm tending to go with soldering + epoxy)
If everything works as I expect, my plan is to reduce the size of the static fins to the point that the CP goes closer to the CG, as long as the stabilization is working
So, can you see any obvious breach on this idea? Any similar projects I can steal some ideas from?
Thanks