I, as much as I hate to admit it ") , am more of an electronics guy than a rocket guy.
, am more of an electronics guy than a rocket guy.
One of the projects I have been working on (I started doing research November of '04), is a tracking system. The idea was to have a little GPS, which would feed data back down over a wireless link to the base station, so once the rocket landed you just type the coordinants into your handheld gps and start walking.
Since one of the rockets I was planning to use it in was a 38mm MDR, it needed to be able to fit in a 1.5" diamater tube. I wanted a range of at least 2 miles, preferably more.
Since I am not a RF guy, and don't have a HAM licence (or intend to get one anytime soon), so I decided that building my own radio was out of the question. I then started doing some research, and came across a company that was selling FCC certified modules that put out 27dB (500mw) at 900mhz, and had a -100dB reciever, which should be good for 20 miles line of sight. Most importantly, it was only 1.5" square! For the tracking I found a little 12 channel GPS reciever.
Thus the Gps Tracking System V1 was born
But of course it didn't work
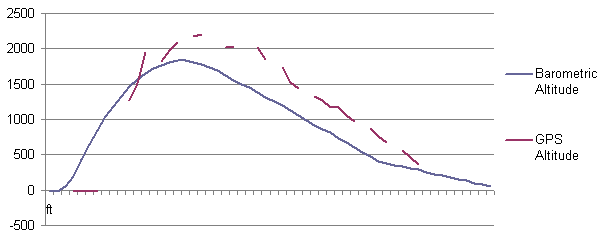
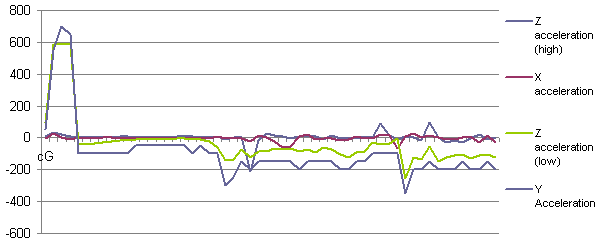
But, in the time it took me to get R1 launched, MaxStream came out with a new line of links, these guys have 30dB (1W) tx, and a -110dB rx, that are only 1.5" wide. So I ordered a few... Then hacked up a board, and launched. This time it actually worked! (the data from the launch is in a .zip file in the 2nd post)
But the 2nd launch I forgot to arm the recovery electronics in the rocket...:cry: At least now I have a really good Cd number for the rocket
In any case, I am now rebuilding...
This time I am using the same GPS/downlink, but I have added a pic18f2550 processor, MMA2202EG +/-50G accelerometer (to measure the acceleration in the Z axis during the boost), LIS3LV02DQ 3 axis +/-6g accelerometer (for detailed logging or apogee calculation), MPXA4115A6U pressure transducer (for altitude monitoring), an array of 8 24LC512 .5mb EEPROMs to store data during the flight, 3 high current output channels (oepn drain so you can use a 2ndary battery for the igniters), a few uncomitted analog/digital I/O pins, and even a I2C bus (you don't need to know anything more than that it is really cool ), and of course a bunch of blinky lights.
Once it is all working the project is going to be 100% open source, code, PCB layouts, etc will be available for download. If anyone is interisted I would be happy to build one for you. Right now it looks like the complete system is going to come in at a bit over $500.
Right now I am working on getting enough code written that I can prove that all of the parts will work happily together, which also makes it prime time to add more features.
Questions? Comments? Suggestions?
, am more of an electronics guy than a rocket guy.One of the projects I have been working on (I started doing research November of '04), is a tracking system. The idea was to have a little GPS, which would feed data back down over a wireless link to the base station, so once the rocket landed you just type the coordinants into your handheld gps and start walking.
Since one of the rockets I was planning to use it in was a 38mm MDR, it needed to be able to fit in a 1.5" diamater tube. I wanted a range of at least 2 miles, preferably more.
Since I am not a RF guy, and don't have a HAM licence (or intend to get one anytime soon), so I decided that building my own radio was out of the question. I then started doing some research, and came across a company that was selling FCC certified modules that put out 27dB (500mw) at 900mhz, and had a -100dB reciever, which should be good for 20 miles line of sight. Most importantly, it was only 1.5" square! For the tracking I found a little 12 channel GPS reciever.
Thus the Gps Tracking System V1 was born
But of course it didn't work
But, in the time it took me to get R1 launched, MaxStream came out with a new line of links, these guys have 30dB (1W) tx, and a -110dB rx, that are only 1.5" wide. So I ordered a few... Then hacked up a board, and launched. This time it actually worked! (the data from the launch is in a .zip file in the 2nd post)
But the 2nd launch I forgot to arm the recovery electronics in the rocket...:cry: At least now I have a really good Cd number for the rocket
In any case, I am now rebuilding...
This time I am using the same GPS/downlink, but I have added a pic18f2550 processor, MMA2202EG +/-50G accelerometer (to measure the acceleration in the Z axis during the boost), LIS3LV02DQ 3 axis +/-6g accelerometer (for detailed logging or apogee calculation), MPXA4115A6U pressure transducer (for altitude monitoring), an array of 8 24LC512 .5mb EEPROMs to store data during the flight, 3 high current output channels (oepn drain so you can use a 2ndary battery for the igniters), a few uncomitted analog/digital I/O pins, and even a I2C bus (you don't need to know anything more than that it is really cool
), and of course a bunch of blinky lights.Once it is all working the project is going to be 100% open source, code, PCB layouts, etc will be available for download. If anyone is interisted I would be happy to build one for you. Right now it looks like the complete system is going to come in at a bit over $500.
Right now I am working on getting enough code written that I can prove that all of the parts will work happily together, which also makes it prime time to add more features.
Questions? Comments? Suggestions?